로봇 위치 추적 정확도 개선: 가속도 피드포워드 최적화 여정
기존 수치 미분 방식의 가속도 피드포워드(FF)로는 약 5% 개선에 그쳤습니다. 이론적으로 기대한 것보다 훨씬 낮은 수치입니다.
핵심 질문: "모션 플래너의 가속도를 직접 사용하면 얼마나 더 좋아질까?"
이 질문에 답하기 위해 6가지 가속도 획득 방법을 체계적으로 비교했습니다.
결론 먼저
| 방법 | Position RMSE | 개선율 | Torque RMSE |
|---|---|---|---|
| A0 (없음) | 0.001389 rad | 기준 | 2.77 Nm |
| A1 (수치 미분) | 0.001141 rad | +17.8% | 4.29 Nm (+55%) |
| A4 (LPF) | 0.001095 rad | +21.2% | 2.68 Nm (-3%) |
최적 방법: 플래너 가속도 + Low-Pass Filter (alpha=0.3)
- 위치 정확도 21.2% 개선
- 토크 변동 3% 감소 (기준선 대비)
시스템 아키텍처
핵심 발견: ROS2 JointTrajectoryController가 이미 Quintic Spline 보간으로 가속도를 계산하고 있었습니다. 별도 수치 미분이 필요 없습니다.
새로운 문제: Quintic Spline은 위치/속도/가속도의 연속성을 보장하지만, Jerk(가속도의 미분)는 불연속입니다. 웨이포인트 경계에서 고주파 성분이 발생하여 기계적 진동을 유발할 수 있습니다.
로봇 동역학 방정식
| 항 | 설명 | FF와의 관계 |
|---|---|---|
| 관성 토크 | 가속도 FF 대상 | |
| 코리올리/원심력 토크 | - | |
| 중력 보상 토크 | - | |
| 마찰 보상 토크 | - |
6가지 가속도 획득 방법 비교
| 코드 | 방법 | 설명 |
|---|---|---|
| A0 | None | 가속도 FF 없음 (기준선) |
| A1 | NumDiff | 속도 명령의 수치 미분 (기존 방식) |
| A2 | ABG | Alpha-Beta-Gamma 필터 |
| A3 | Planner | JTC 가속도 직접 사용 (필터 없음) |
| A4 | LPF | JTC 가속도 + Low-Pass Filter |
| A5 | JerkLimit | JTC 가속도 + Jerk 제한 |
수치 미분 (A1)의 문제
acceleration[k] = (velocity[k] - velocity[k-1]) / dt;
| 문제 | 원인 | 결과 |
|---|---|---|
| 위상 지연 | 이산 미분은 현재와 과거 샘플만 사용 | 실제 가속도보다 지연된 값 출력 |
| 노이즈 증폭 | 미분 연산이 고주파 성분을 증폭 | 토크 변동 55% 증가 |
Low-Pass Filter (A4)
플래너 가속도를 직접 사용하면(A3) 웨이포인트 경계에서 Jerk 불연속이 발생합니다. LPF는 이 고주파 성분을 제거하여 부드러운 가속도 신호를 만듭니다.
y[k] = alpha * x[k] + (1 - alpha) * y[k-1];
즉, 새 출력 = (alpha × 새 입력) + ((1-alpha) × 이전 출력) 입니다.
| 변수 | 의미 |
|---|---|
x[k] | 새로 들어온 가속도 값 |
y[k-1] | 이전 필터 출력 |
alpha | 새 값 반영 비율 (0~1) |
alpha=0.3이면 새 값 30% + 이전 값 70%로, 급격한 변화가 완화됩니다.
alpha와 차단 주파수의 관계 ( = 샘플링 주파수 1kHz, = 차단 주파수):
이하 주파수는 통과하고, 이상은 감쇠됩니다.
| Alpha | 차단 주파수 | 특성 |
|---|---|---|
| 0.1 | ~16 Hz | 과도한 필터링, 응답 지연 |
| 0.2 | ~32 Hz | 안정적, 약간의 응답 지연 |
| 0.3 | ~48 Hz | 최적 균형점 |
| 0.5 | ~80 Hz | 빠른 응답, 토크 증가 시작 |
| 0.7 | ~112 Hz | 필터링 약함, 토크 11% 증가 |
실험 결과
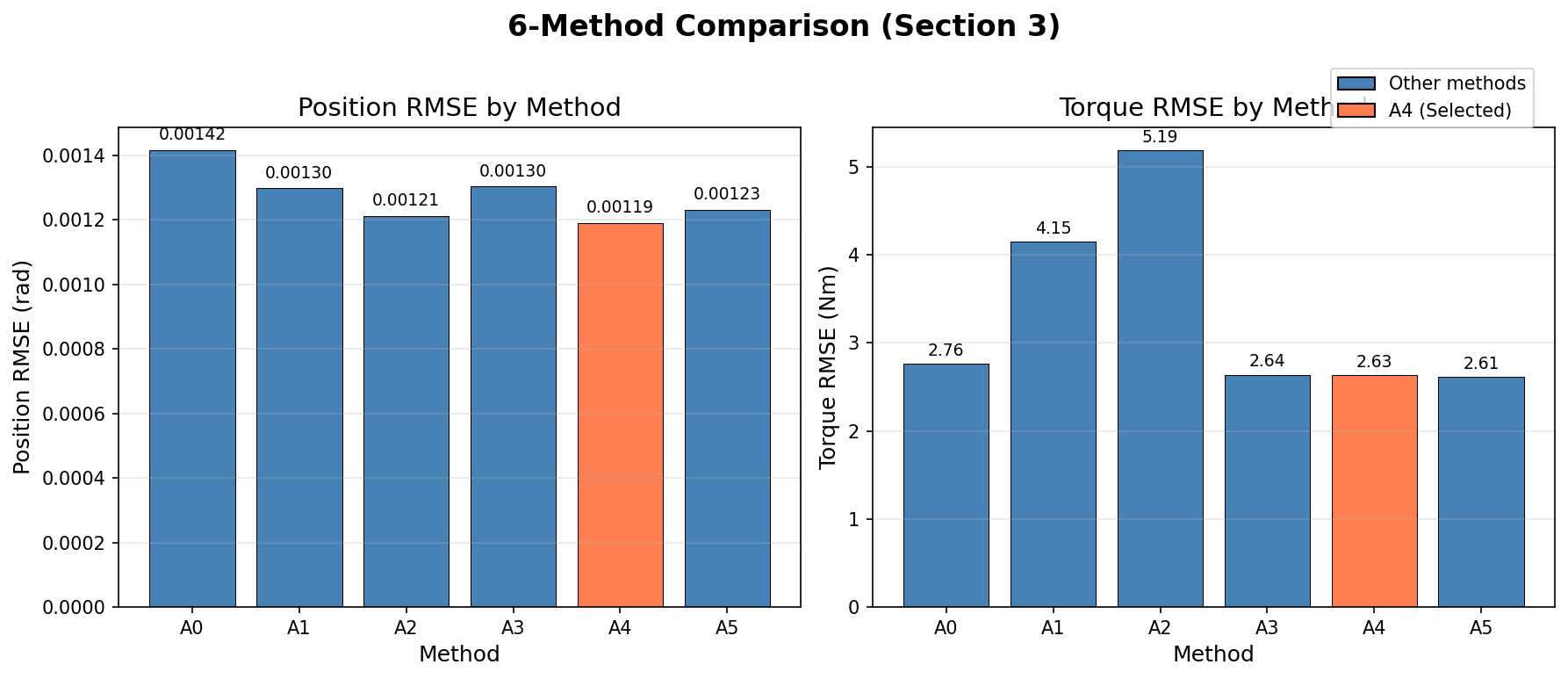
1차 실험: 6가지 방법 비교
Position RMSE(좌)와 Torque RMSE(우) 비교. A4(LPF)가 최적 균형점
Position RMSE 순위:
| 순위 | 방법 | RMSE (rad) | 개선율 |
|---|---|---|---|
| 1 | A4 (LPF) | 0.001190 | +16.0% |
| 2 | A2 (ABG) | 0.001212 | +14.4% |
| 3 | A5 (Jerk) | 0.001231 | +13.1% |
| 4 | A1 (NumDiff) | 0.001297 | +8.4% |
| 5 | A3 (Planner) | 0.001302 | +8.1% |
| 6 | A0 (None) | 0.001416 | 기준 |
Torque RMSE:
| 방법 | Torque RMSE | 평가 |
|---|---|---|
| A5 (Jerk) | 2.61 Nm | 안정 |
| A4 (LPF) | 2.63 Nm | 안정 |
| A3 (Planner) | 2.64 Nm | 안정 |
| A0 (None) | 2.76 Nm | 기준 |
| A1 (NumDiff) | 4.15 Nm | +50% (경고) |
| A2 (ABG) | 5.19 Nm | +88% (탈락) |
A2(ABG) 탈락 이유: 위치는 좋지만 토크 변동이 너무 큽니다.
2차 실험: LPF 파라미터 튜닝
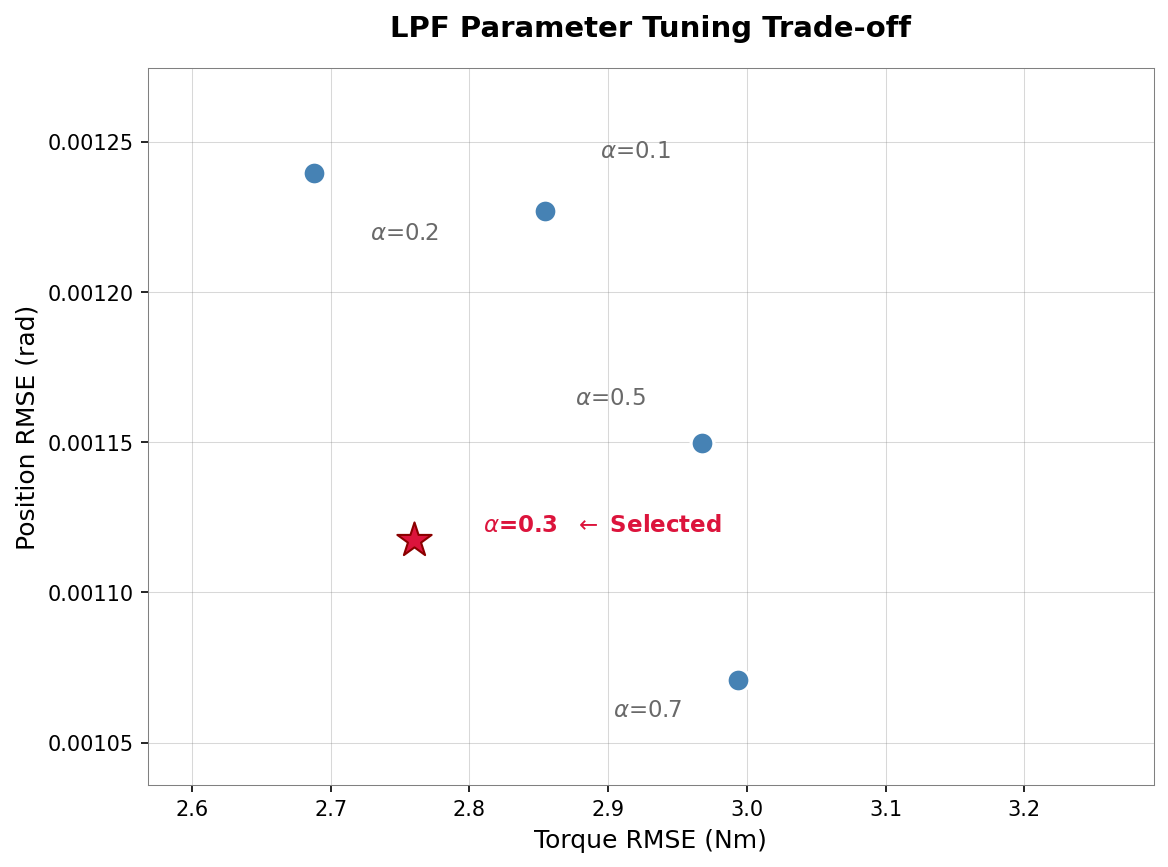
alpha 값에 따른 Position RMSE vs Torque RMSE 트레이드오프. alpha=0.3 선택
| Alpha | 차단 주파수 | Position RMSE | vs alpha=0.2 | Torque RMSE |
|---|---|---|---|---|
| 0.1 | ~16 Hz | 0.001227 rad | +1.0% | 2.85 Nm |
| 0.2 | ~32 Hz | 0.001240 rad | 기준 | 2.69 Nm |
| 0.3 | ~48 Hz | 0.001118 rad | -9.8% | 2.76 Nm |
| 0.5 | ~80 Hz | 0.001150 rad | -7.3% | 2.97 Nm |
| 0.7 | ~112 Hz | 0.001071 rad | -13.6% | 2.99 Nm |
alpha=0.3 선택 이유:
- Position 개선: alpha=0.2 대비 9.8% 개선
- Torque 안정: 기준선(2.77 Nm)과 거의 동일한 2.76 Nm
- 안전 마진: alpha=0.7은 토크 11.2% 증가
3차 실험: 최종 벤치마크
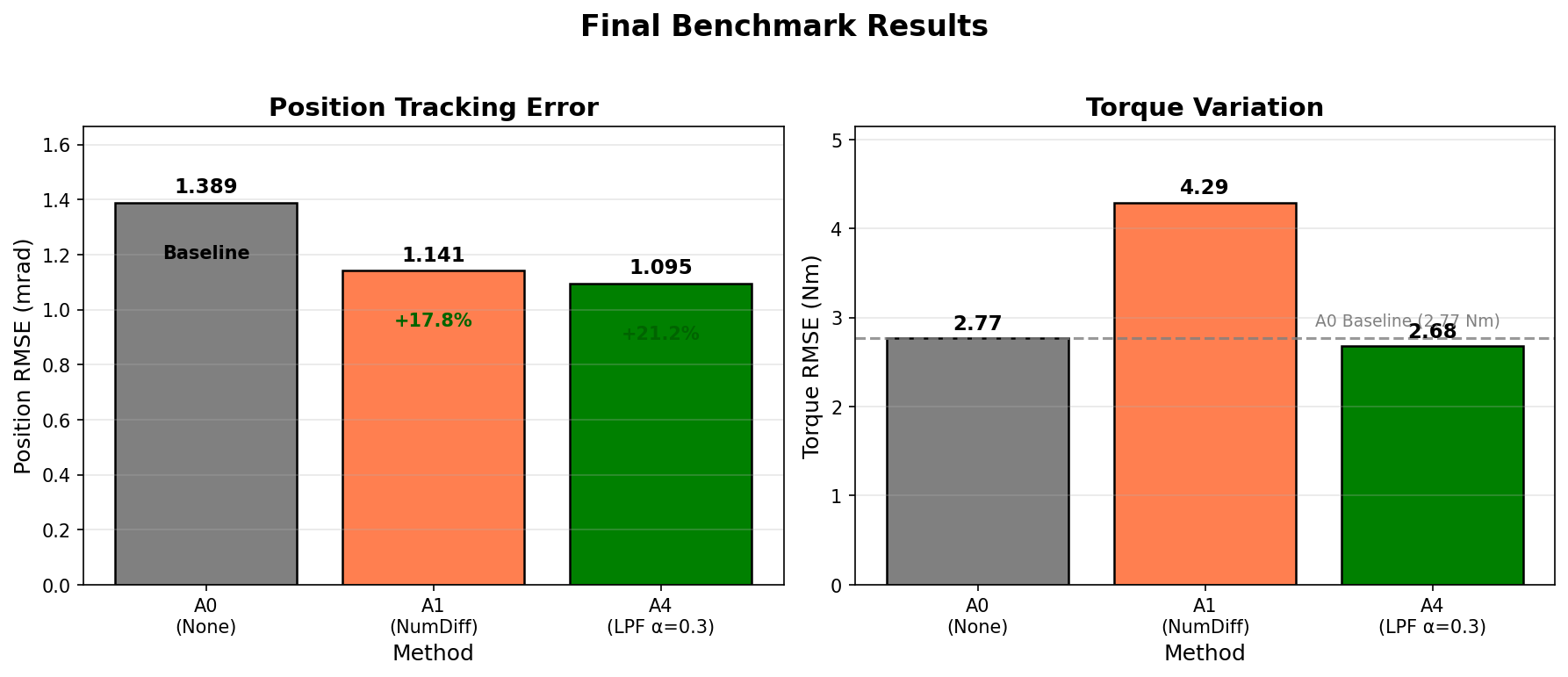
A0(기준), A1(수치 미분), A4(LPF) 최종 비교
Position 추적 성능:
| 방법 | Position RMSE | 표준편차 | 개선율 |
|---|---|---|---|
| A4 (LPF) | 0.001095 rad | 0.000087 | +21.2% |
| A1 (NumDiff) | 0.001141 rad | 0.000064 | +17.8% |
| A0 (None) | 0.001389 rad | 0.000071 | 기준 |
Torque 안정성:
| 방법 | Torque RMSE | 표준편차 | 평가 |
|---|---|---|---|
| A4 (LPF) | 2.68 Nm | 0.37 | 안정 (-3%) |
| A0 (None) | 2.77 Nm | 0.52 | 기준 |
| A1 (NumDiff) | 4.29 Nm | 1.04 | 불안정 (+55%) |
왜 플래너 가속도 단독(A3)으로는 부족한가?
플래너 가속도를 필터 없이 직접 사용하면 8.1% 개선에 그칩니다 (A4의 절반).
원인: 웨이포인트 경계에서 Jerk 불연속이 고주파 성분을 생성하여 컨트롤러에 부담을 줍니다.
왜 LPF(A4)가 Jerk Limiting(A5)보다 좋은가?
| 측면 | LPF | Jerk Limiting |
|---|---|---|
| 응답 특성 | 지수적 감쇠 | 선형 램프 |
| 수렴 속도 | 초기 빠른 응답, 점진적 수렴 | 일정 속도 접근, 느린 수렴 |
| 예시: Δacc=20 rad/s², MAX_JERK=50 rad/s³ | 빠름 | 400ms 소요 |
웜업 효과
실험 중 웜업 효과를 발견했습니다:
| 조건 | 웜업 전 | 웜업 후 | 차이 |
|---|---|---|---|
| A3 (Planner) | 0.001532 rad | 0.001302 rad | 15% 개선 |
시사점: 콜드 스타트 시 성능이 15% 저하될 수 있습니다. 실제 로봇 운영에서 고려해야 합니다.
실험 조건
| 파라미터 | 값 | 이유 |
|---|---|---|
| 테스트 관절 | J1 (어깨) | 최대 마찰(Fc=35Nm)로 FF 효과 극대화 |
| 속도 스케일 | 0.3, 0.4, 0.5 | 고속 조건에서 차이 명확화 |
| 가속도 스케일 | 0.5 | 고가속 조건 |
| 반복 횟수 | 속도당 4회 | 방향 균형 (정방향 2회 + 역방향 2회) |
| 궤적 | ±30도 토글 | 표준 테스트 모션 |
핵심 정리
-
기존 수치 미분(A1)의 한계: 이산 미분의 위상 지연과 노이즈 증폭으로 토크 변동이 55% 증가합니다.
-
ROS2 JTC가 이미 가속도를 계산합니다. 별도 수치 미분 없이 플래너 가속도를 직접 활용할 수 있습니다.
-
Jerk 불연속 문제: 플래너 가속도를 필터 없이 사용하면 웨이포인트 경계의 고주파 성분이 성능을 저하시킵니다.
-
최적 방법: LPF (alpha=0.3)
- Position RMSE: 21.2% 개선
- Torque RMSE: 3% 감소
- 위치 정확도와 토크 안정성을 동시에 개선
-
웜업 효과: 콜드 스타트 시 15% 성능 저하가 발생할 수 있습니다.
단순한 1차 Low-Pass Filter가 위치 정확도와 토크 안정성을 동시에 개선하는 최적 해법이었습니다.