강화학습 기반 하위 모터 제어: PID/ADRC를 넘어서
LLM이 대체할 수 없는 1kHz 실시간 모터 제어 영역에서, 강화학습(RL)으로 기존 PID/ADRC 수동 튜닝을 대체하는 WIM의 접근 방식을 소개합니다.
AI와 Robotics 분야의 최신 기술, 실무 경험, 그리고 깊이 있는 인사이트를 공유합니다.
Categories
LLM이 대체할 수 없는 1kHz 실시간 모터 제어 영역에서, 강화학습(RL)으로 기존 PID/ADRC 수동 튜닝을 대체하는 WIM의 접근 방식을 소개합니다.
1kHz RT 루프에서 atomic memory ordering이 성능 병목이 될 수 있는지 Jetson Orin(Cortex-A78AE)에서 직접 측정했습니다. AArch64에서 seq_cst와 release/acquire의 비용은 사실상 동일하며, 25개 atomic 연산의 총 비용은 1ms 예산의 0.01% 미만입니다.
 비전/추론
비전/추론컴퓨터 비전의 템플릿 매칭 기술이 픽셀 기반 방식에서 SIFT/ORB를 거쳐 SuperPoint/SuperGlue까지 어떻게 발전했는지 설명합니다. 각 방법의 원리, 한계, 그리고 용도별 권장사항을 다룹니다.
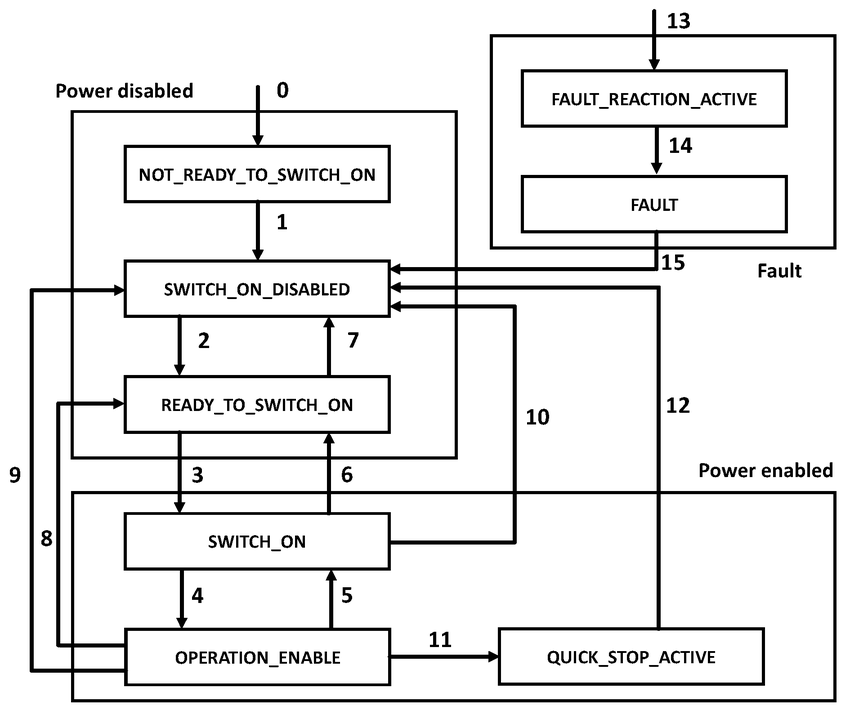 제어
제어EtherCAT과 CANopen 기반 산업용 로봇의 모터 제어 표준인 CiA402 프로필을 설명합니다. 상태 머신, Controlword/Statusword 비트 구조, 동작 모드를 실제 예시와 함께 다룹니다.
로봇 제어 시스템의 IPC 성능을 결정하는 요인은 프로세스 경계가 아닌 동기화 메커니즘입니다. Mutex 기반 78-103µs에서 Lock-free로 0.74-0.82µs를 달성한 100배 개선 사례를 공유합니다.
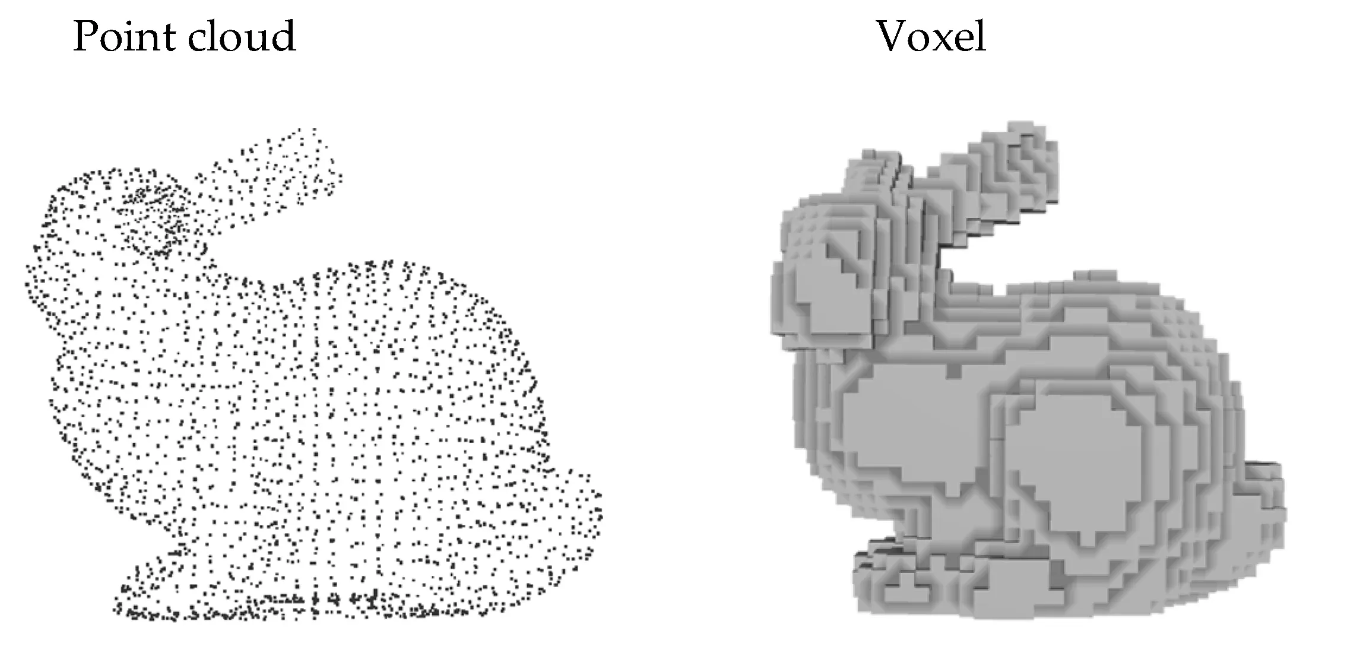 인지/캘리브레이션
인지/캘리브레이션로봇이 3D 환경을 표현하고 이해하는 Voxel, SDF, TSDF, ESDF 기술을 설명합니다. Point Cloud와의 차이점, 로봇 경로 계획과 표면 재구성에서의 활용 사례를 다룹니다.
WIM Inc.는 AI와 Robotics 기술을 융합하여 산업 자동화의 미래를 만들어가고 있습니다. 이 블로그에서는 우리가 마주한 기술적 도전과 해결 과정, 그리고 얻은 인사이트를 공유합니다.
실무에서 검증된 기술, 깊이 있는 분석, 그리고 실용적인 가이드를 통해 AI와 Robotics 분야의 엔지니어들에게 도움이 되고자 합니다.