제어
강화학습 기반 하위 모터 제어: PID/ADRC를 넘어서
LLM이 대체할 수 없는 1kHz 실시간 모터 제어 영역에서, 강화학습(RL)으로 기존 PID/ADRC 수동 튜닝을 대체하는 WIM의 접근 방식을 소개합니다.
로봇 제어, 모터 드라이버, 마찰 보상 관련 기술과 실무 경험을 공유합니다.
LLM이 대체할 수 없는 1kHz 실시간 모터 제어 영역에서, 강화학습(RL)으로 기존 PID/ADRC 수동 튜닝을 대체하는 WIM의 접근 방식을 소개합니다.
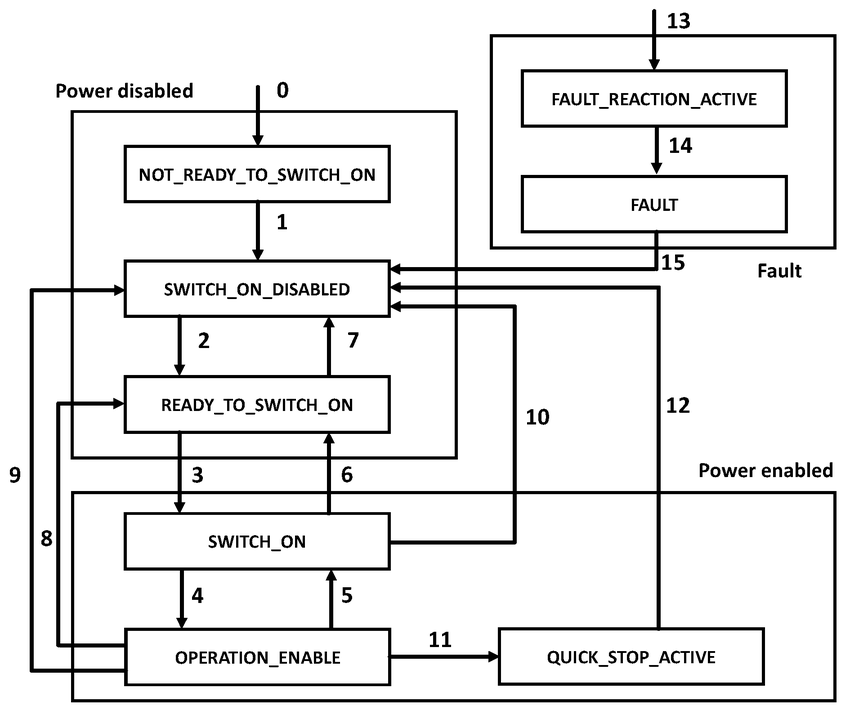
EtherCAT과 CANopen 기반 산업용 로봇의 모터 제어 표준인 CiA402 프로필을 설명합니다. 상태 머신, Controlword/Statusword 비트 구조, 동작 모드를 실제 예시와 함께 다룹니다.
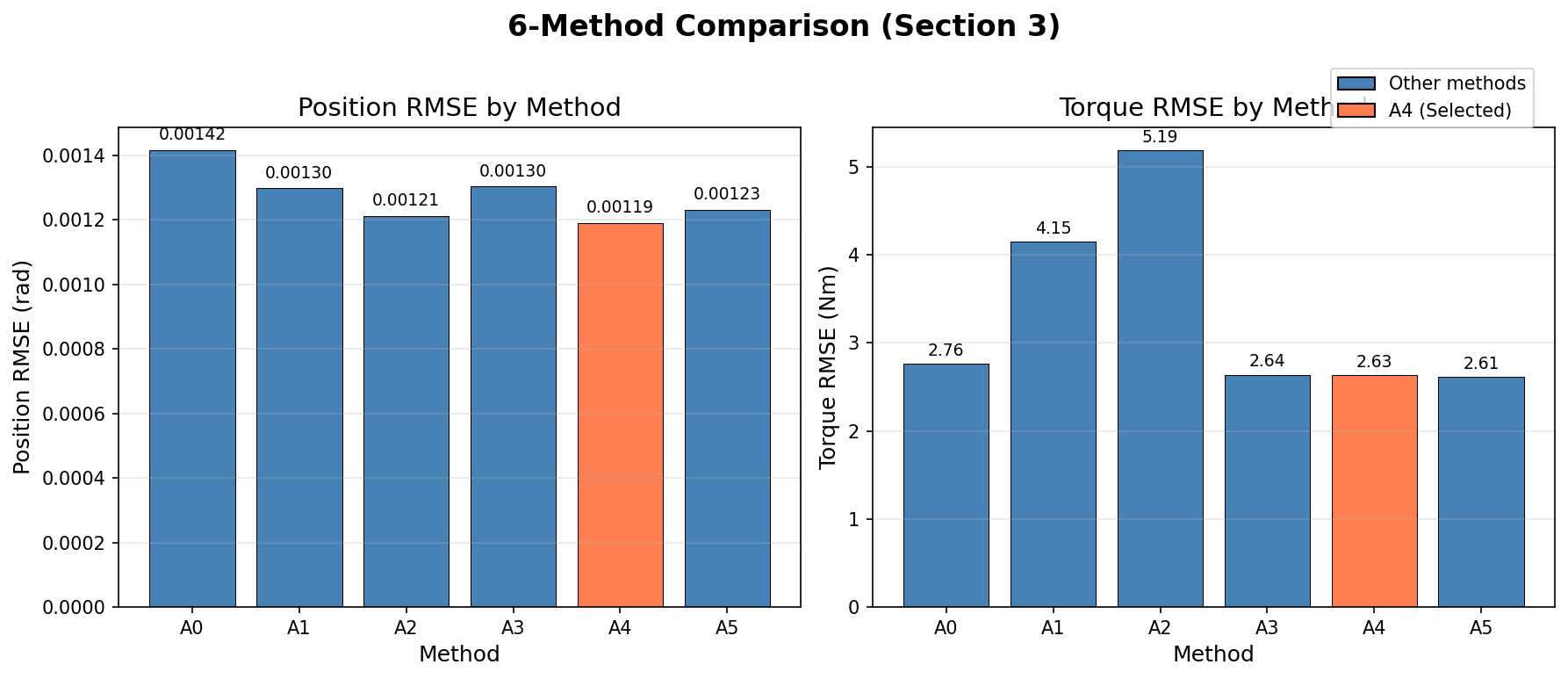
6축 로봇 암의 가속도 피드포워드 제어를 최적화한 과정을 공유합니다. 수치 미분 대신 플래너 가속도 + LPF 조합으로 위치 RMSE 21.2% 개선과 토크 안정성을 동시에 달성했습니다.
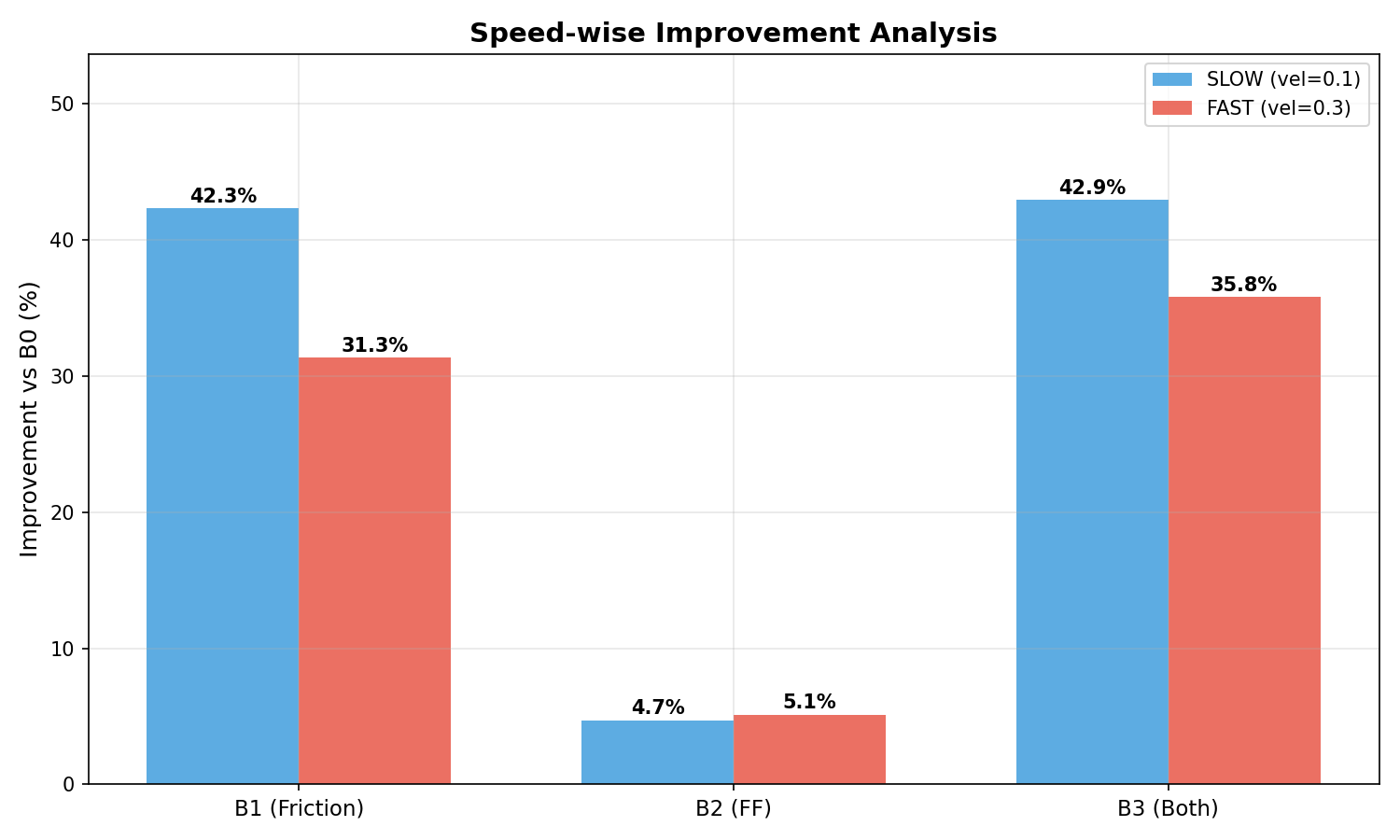
6축 협동로봇의 마찰보상과 가속도 피드포워드 효과를 160회 2×2 실험으로 검증합니다. AI 에이전트(ralph-loop)로 마찰 계수를 튜닝하고, 자동화 스크립트로 검증 실험을 수행했습니다. 마찰보상만으로 36% 개선(Cohen's d=1.49), 총 개선의 93%를 달성했습니다.