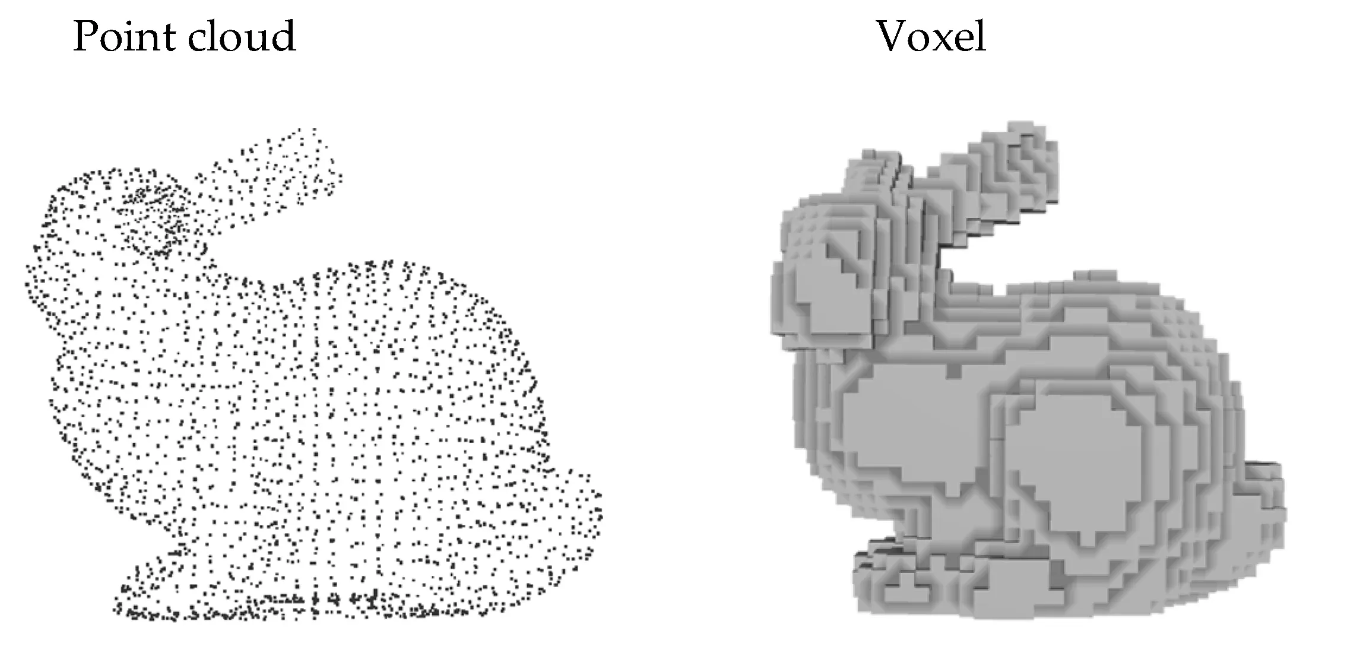
인지/캘리브레이션2026년 1월 14일로봇이 3D 공간을 이해하는 방법: Voxel과 SDF로봇이 3D 환경을 표현하고 이해하는 Voxel, SDF, TSDF, ESDF 기술을 설명합니다. Point Cloud와의 차이점, 로봇 경로 계획과 표면 재구성에서의 활용 사례를 다룹니다.
인지/캘리브레이션2024년 10월 28일Touch Probe와 Kabsch 알고리즘을 활용한 정밀 로봇 칼리브레이션0.5mm 이하의 초정밀 Sim-to-Real 칼리브레이션을 달성하기 위해 Touch Probe와 Kabsch 알고리즘을 결합한 실전 적용 사례를 다룹니다.