Robotics
모터 제어의 표준어: CiA402 프로필
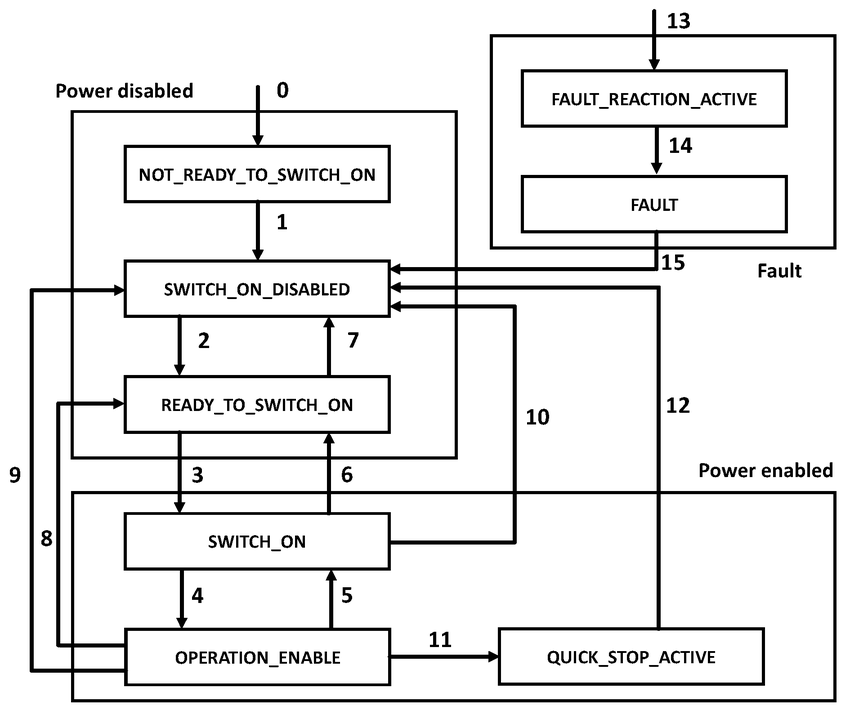
EtherCAT과 CANopen 기반 산업용 로봇의 모터 제어 표준인 CiA402 프로필을 설명합니다. 상태 머신, Controlword/Statusword 비트 구조, 동작 모드를 실제 예시와 함께 다룹니다.
로봇 제어, 모션 플래닝, 센서 융합 분야의 최신 기술과 실무 경험을 공유합니다. 산업용 로봇부터 자율 시스템까지, 실제 프로젝트에서 얻은 인사이트를 전달합니다.
EtherCAT과 CANopen 기반 산업용 로봇의 모터 제어 표준인 CiA402 프로필을 설명합니다. 상태 머신, Controlword/Statusword 비트 구조, 동작 모드를 실제 예시와 함께 다룹니다.
로봇 제어 시스템의 IPC 성능을 결정하는 요인은 프로세스 경계가 아닌 동기화 메커니즘입니다. Mutex 기반 78-103µs에서 Lock-free로 0.74-0.82µs를 달성한 100배 개선 사례를 공유합니다.
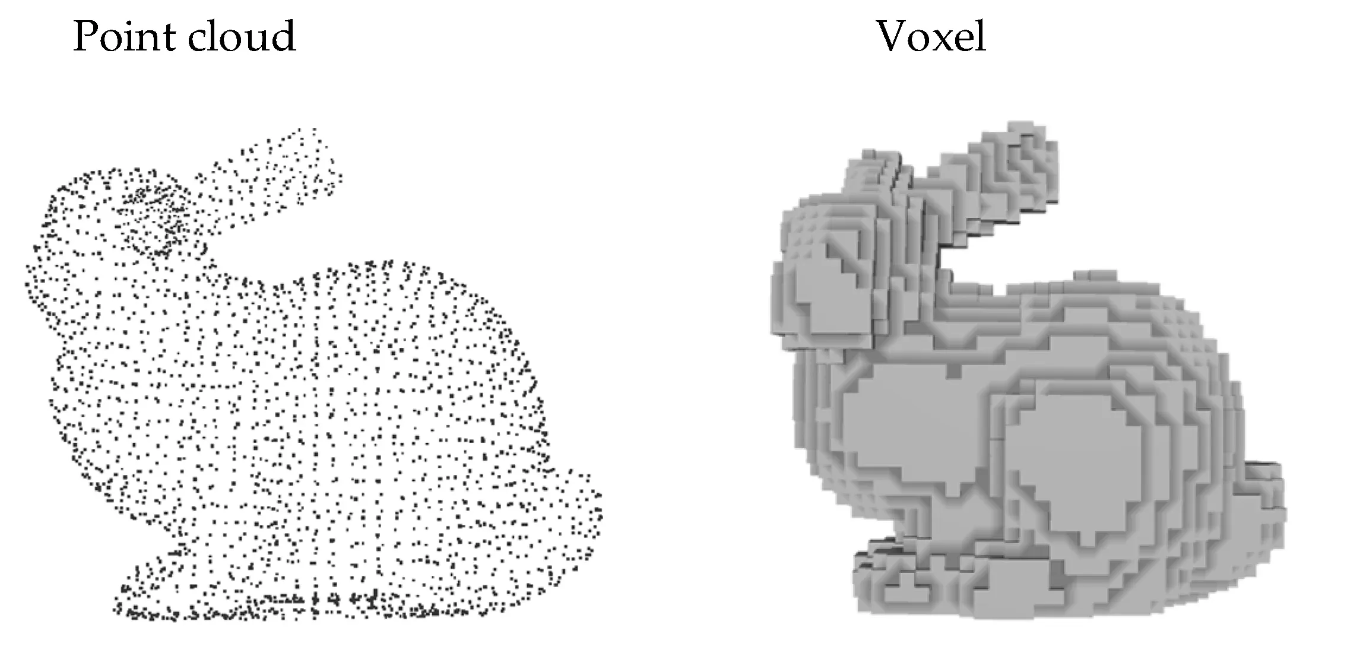
로봇이 3D 환경을 표현하고 이해하는 Voxel, SDF, TSDF, ESDF 기술을 설명합니다. Point Cloud와의 차이점, 로봇 경로 계획과 표면 재구성에서의 활용 사례를 다룹니다.
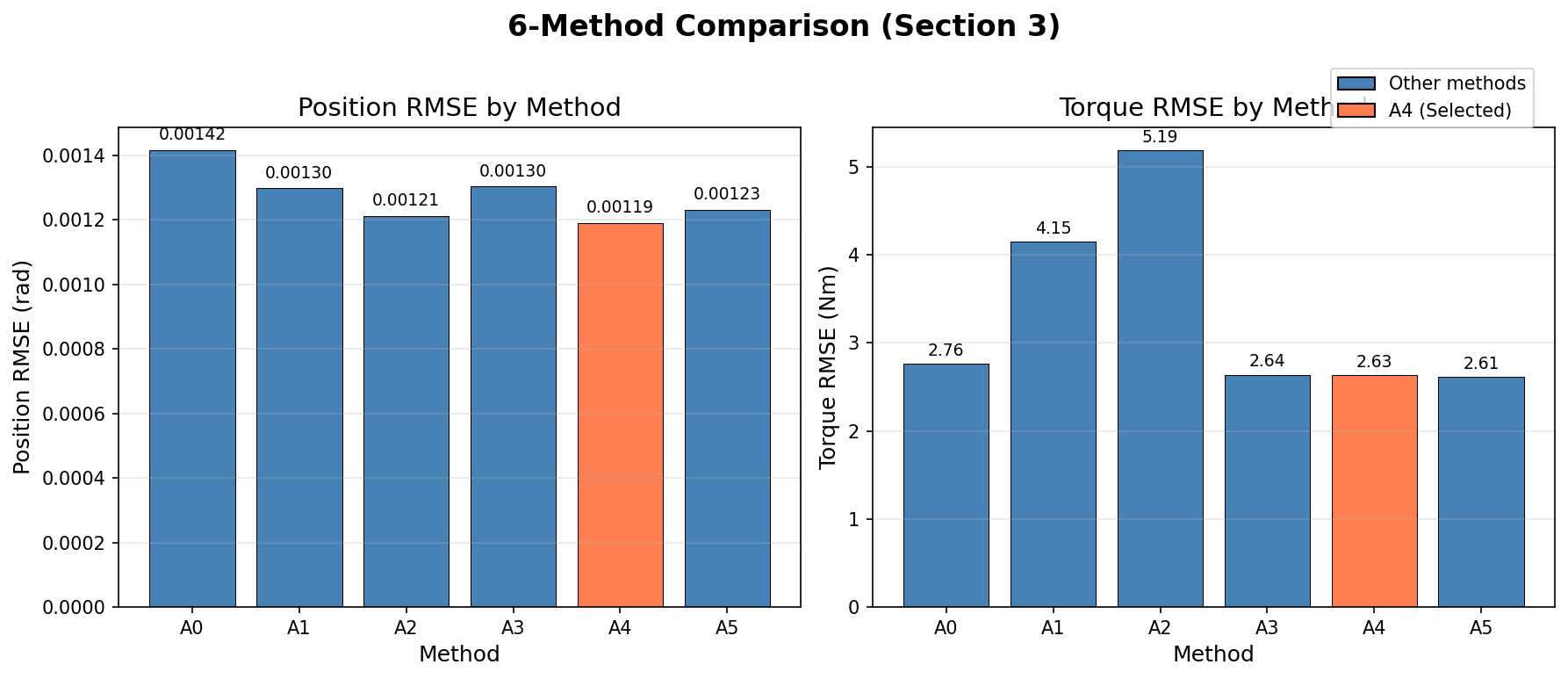
6축 로봇 암의 가속도 피드포워드 제어를 최적화한 과정을 공유합니다. 수치 미분 대신 플래너 가속도 + LPF 조합으로 위치 RMSE 21.2% 개선과 토크 안정성을 동시에 달성했습니다.
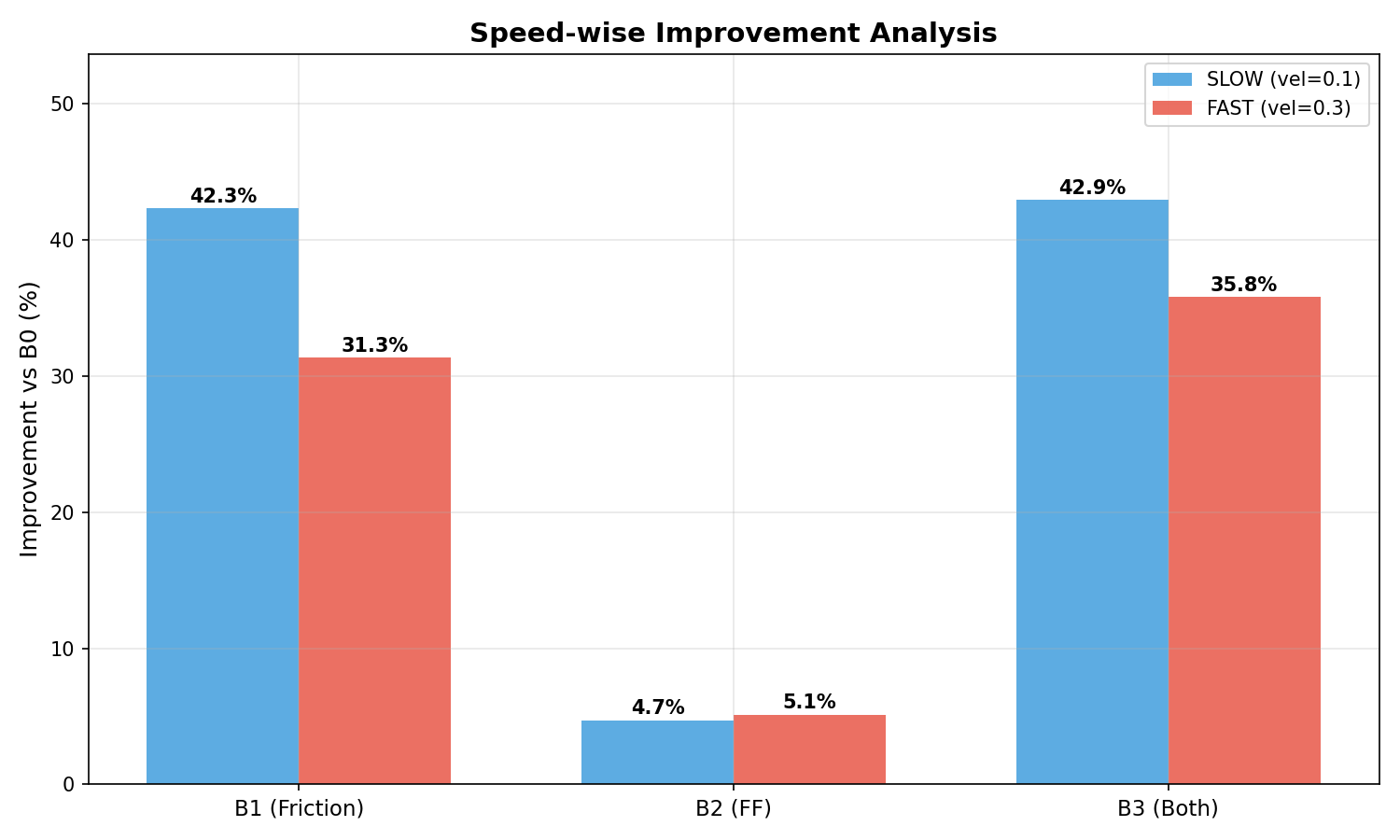
6축 협동로봇의 마찰보상과 가속도 피드포워드 효과를 160회 2×2 실험으로 검증합니다. AI 에이전트(ralph-loop)로 마찰 계수를 튜닝하고, 자동화 스크립트로 검증 실험을 수행했습니다. 마찰보상만으로 36% 개선(Cohen's d=1.49), 총 개선의 93%를 달성했습니다.
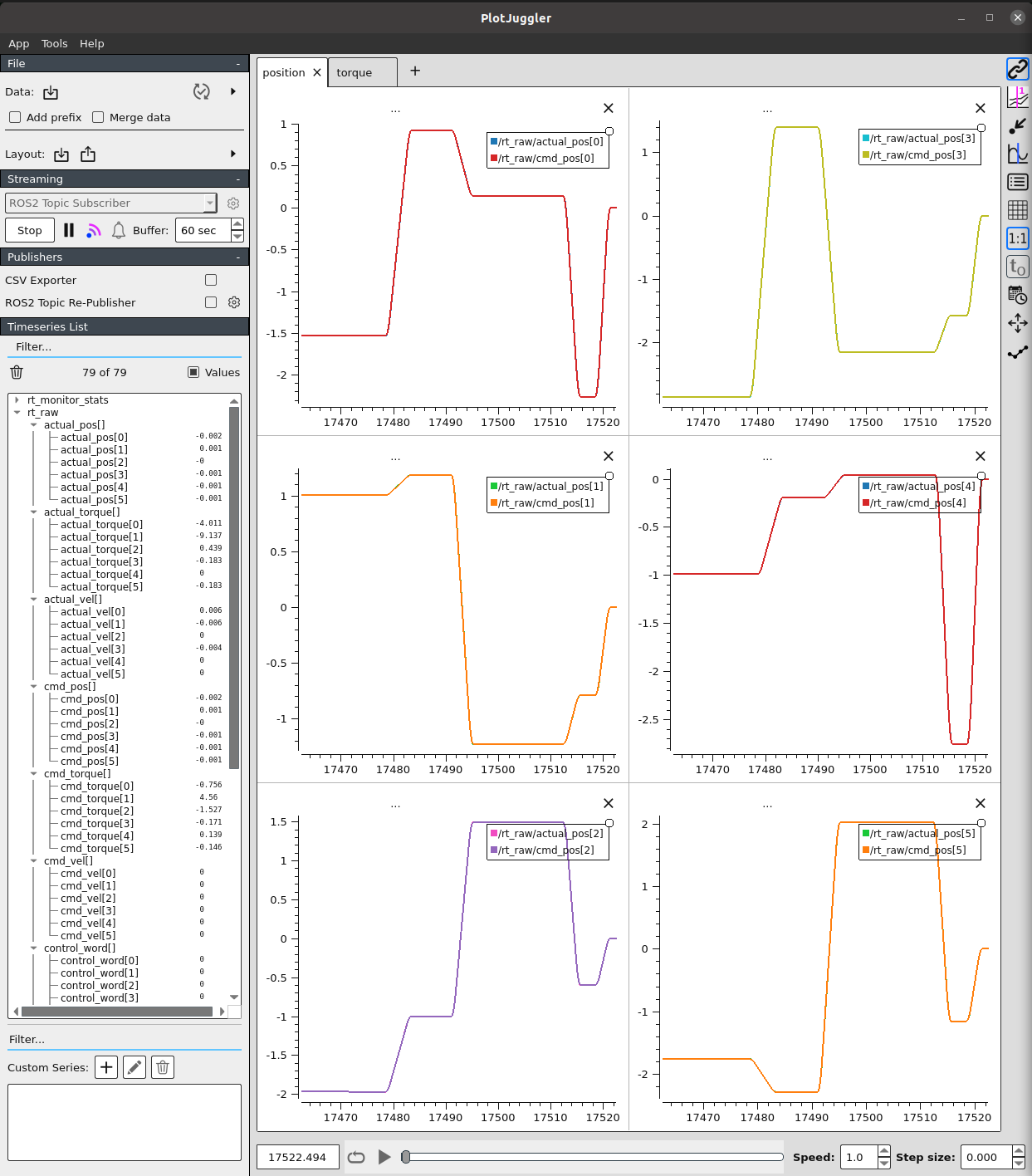
EtherCAT 기반 1kHz 실시간 제어 루프의 성능 데이터를 안전하게 수집, 저장, 시각화하는 모니터링 아키텍처를 설계합니다. Lock-free SPSC Queue와 ROS2 토픽 계층화로 RT 결정성을 유지하면서 디버깅 데이터를 확보합니다.
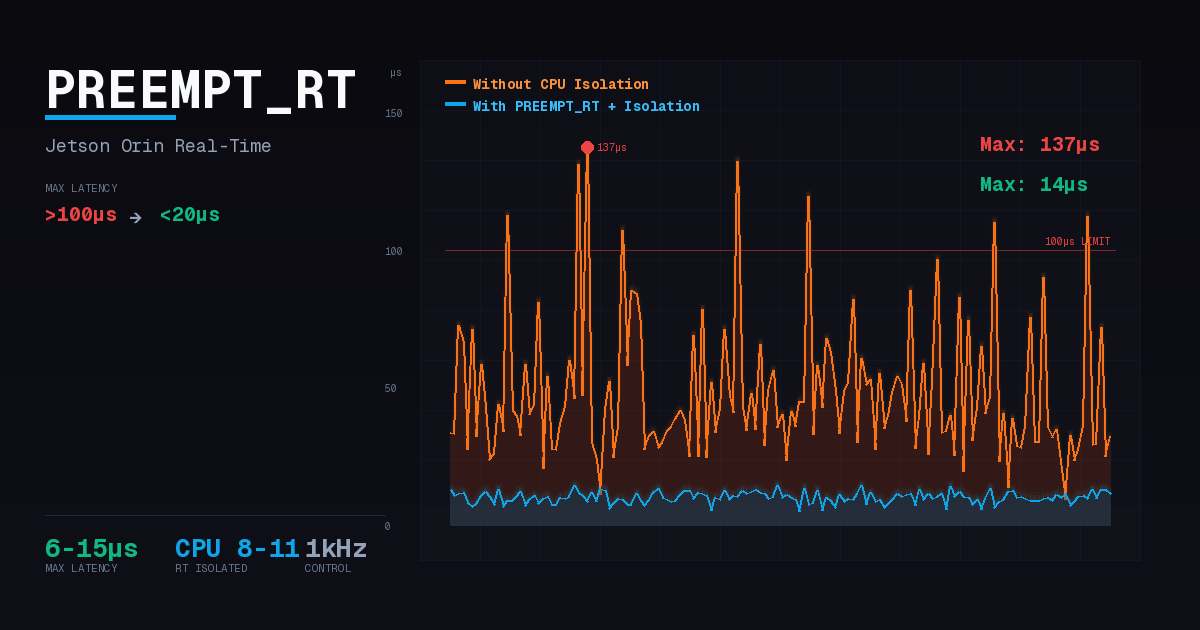
NVIDIA Jetson Orin에서 PREEMPT_RT 커널과 CPU 격리 설정만으로 1kHz EtherCAT 제어가 가능한지 실측 데이터로 검증합니다. GPU, Storage, EtherCAT 부하 조건에서 Max latency 20µs 이하를 달성한 결과를 공유합니다.
델타 로봇, 병렬 링크 그리퍼 등 폐쇄형 루프 구조의 로봇이 Isaac Sim에서 동작하지 않는 문제를 Guide Joint와 Exclude From Articulation으로 해결하는 방법을 다룹니다.
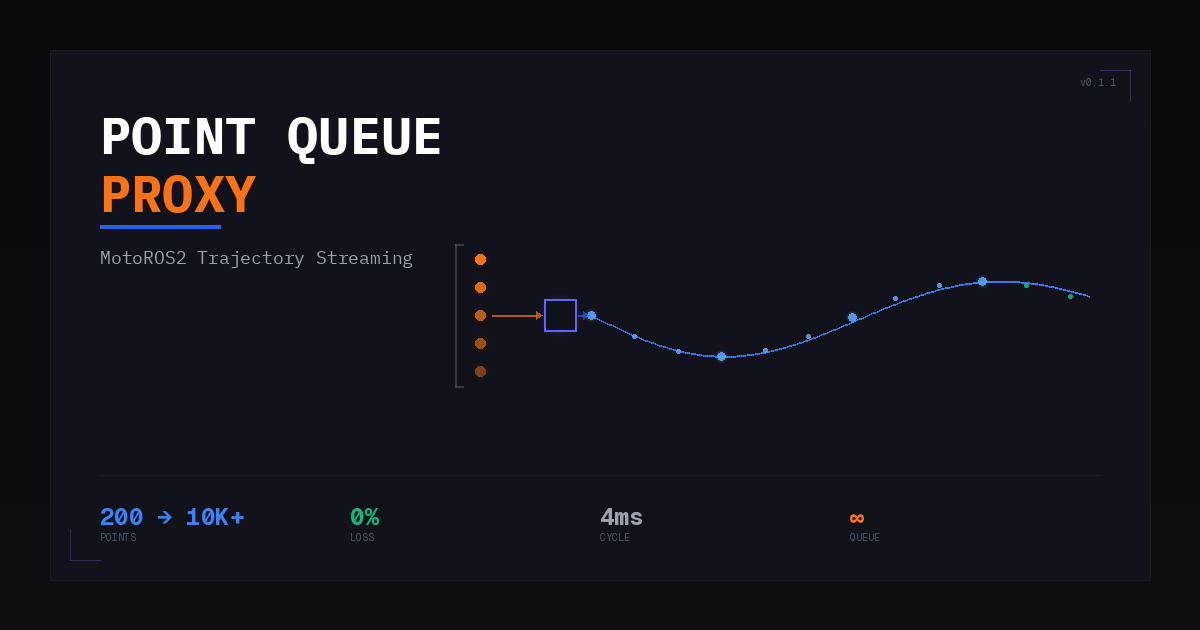
Yaskawa 산업용 로봇의 MotoROS2 드라이버가 가진 200포인트 궤적 제한과 BUSY 응답 문제를 해결하기 위한 Proxy Server 아키텍처 설계 및 구현 사례를 다룹니다.
0.5mm 이하의 초정밀 Sim-to-Real 칼리브레이션을 달성하기 위해 Touch Probe와 Kabsch 알고리즘을 결합한 실전 적용 사례를 다룹니다.