로봇이 3D 공간을 이해하는 방법: Voxel과 SDF
2D 이미지에서 가장 작은 단위는 픽셀(Pixel)입니다. 그렇다면 3D 공간의 픽셀은 무엇일까요? 바로 복셀(Voxel)입니다. Volume과 Pixel의 합성어로, 1×1×1 크기의 정육면체가 3D 공간을 채웁니다.
이 글에서는 로봇이 환경을 이해하기 위해 사용하는 Voxel, SDF(Signed Distance Fields), 그리고 그 변형인 TSDF와 ESDF를 설명합니다.
Voxel: 3D 공간의 데이터 컨테이너
Voxel은 직교 좌표계에서 고유한 3D 좌표 를 가지는 데이터 컨테이너입니다. 각 Voxel에는 해당 위치의 물리적 속성을 저장할 수 있습니다:
- 색상 (RGB)
- 밀도
- 점유 여부 (Occupied/Free/Unknown)
- 장애물까지의 거리
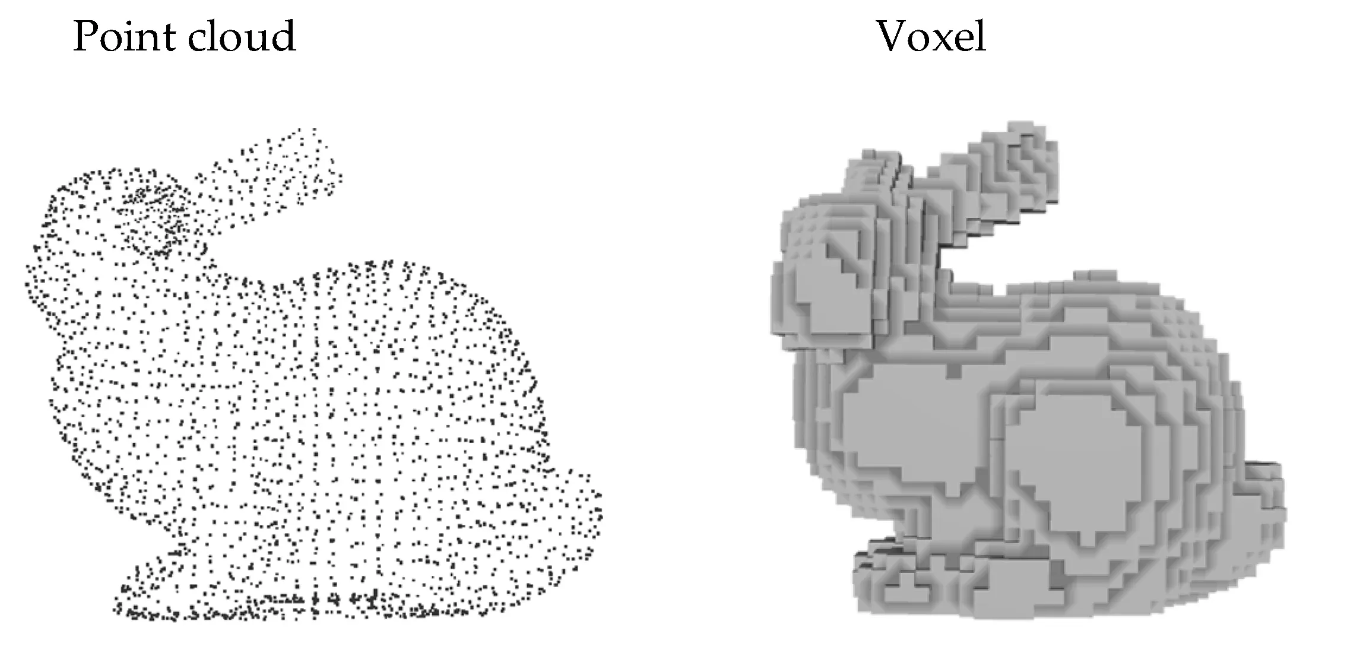
Point Cloud vs Voxel
LiDAR나 깊이 카메라에서 얻는 Point Cloud와 Voxel은 근본적으로 다릅니다:
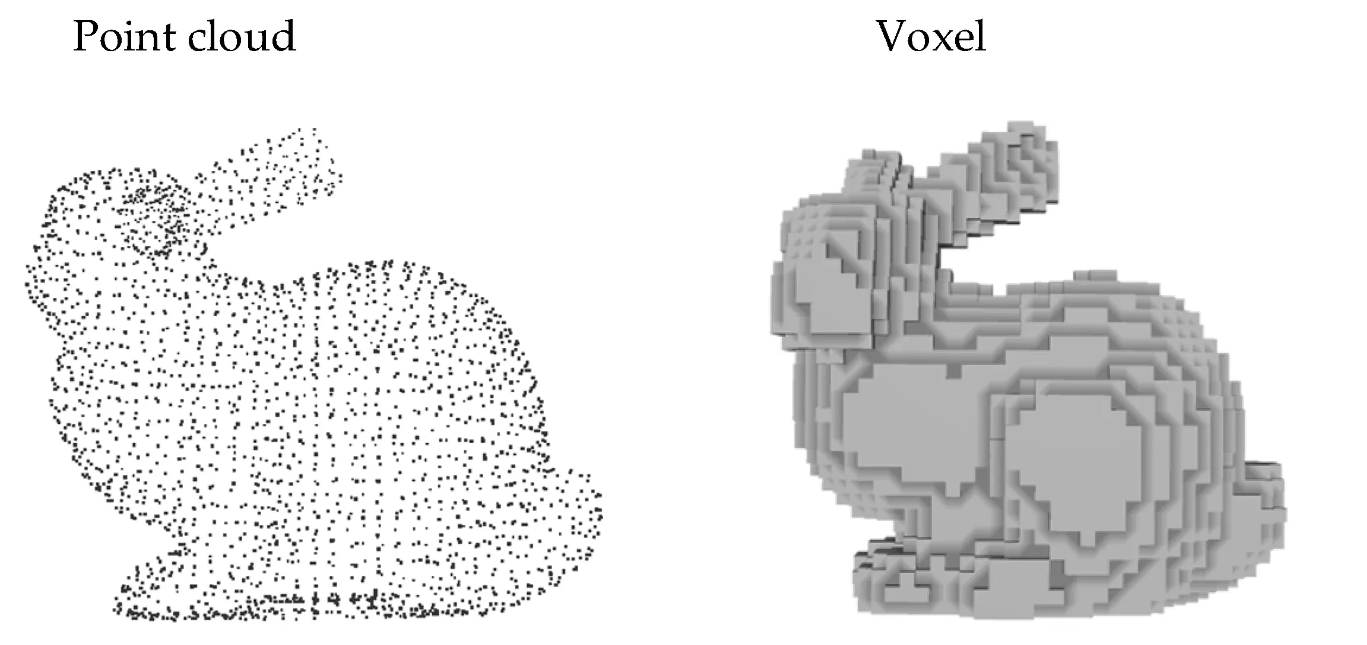
Stanford Bunny 모델의 Point Cloud(좌)와 Voxel(우) 표현 비교
| 측면 | Point Cloud | Voxel |
|---|---|---|
| 표현 방식 | 표면(Shell) - 센서에서 반사된 점들의 집합 | 부피(Volume) - 표면, 내부, 빈 공간 포함 |
| 좌표계 | 카메라 기준 (센서마다 다름) | 고정된 공간 그리드, 고유 좌표 |
| 데이터 지속성 | 매 프레임 새 점 생성, 좌표 변환 및 중복 제거 필요 | 고정된 고유 좌표, 데이터 병합 용이 |
| 빈 공간 정보 | 없음 | 있음 (Occupancy Grid) |
핵심 차이: Point Cloud는 "어디에 물체가 있는가"만 알려주지만, Voxel은 "어디가 비어있는가"도 알려줍니다.
Occupancy Grid Map
Voxel에 점유 정보(Occupancy)를 저장하면 3D 지도가 됩니다:
| 상태 | 의미 |
|---|---|
| Occupied | 장애물 존재 |
| Free | 빈 공간 |
| Unknown | 아직 탐색되지 않음 |
값은 0/1 이진값 또는 확률값으로 저장할 수 있습니다.
Occupancy Grid의 한계
단순 점유 정보만으로는 두 가지 문제를 해결할 수 없습니다:
문제 1: 안전 거리 검증
로봇은 부피를 가진 강체입니다. 현재 위치가 장애물에 얼마나 가까운지 알아야 안전한 이동이 가능합니다.
- Occupancy Grid: 현재 위치가 Occupied인지만 확인 가능
- 한계: "얼마나 가까운가?"를 알 수 없음 → 매번 주변 Voxel을 탐색해야 함
문제 2: 경로 최적화를 위한 기울기 정보
현대 경로 계획 알고리즘은 부드러운 궤적 생성을 위해 기울기(Gradient) 정보가 필요합니다.
- Occupancy Grid: 0/1 이산값 → 미분 불가능
- 한계: 최적화 기반 경로 계획에 사용 불가
SDF: Signed Distance Fields
SDF는 각 Voxel에 가장 가까운 장애물 표면까지의 거리를 미리 계산해서 저장합니다.
SDF의 구성 요소
- 값(거리): 가장 가까운 장애물까지의 유클리드 거리
- 부호:
- 양수(+): 장애물 외부
- 음수(−): 장애물 내부
SDF가 해결하는 문제
안전 거리 검증:
현재 위치의 SDF 값 = 3.5cm
→ 가장 가까운 장애물이 3.5cm 떨어져 있음
→ 로봇 반경이 3cm면 안전
주변 Voxel을 탐색할 필요 없이 단일 조회로 안전 거리를 확인할 수 있습니다.
기울기 기반 최적화:
SDF는 연속적인 거리값이므로 기울기(미분값)를 계산할 수 있습니다. 이를 통해:
- 장애물에서 멀어지는 방향을 알 수 있음
- 최적화 기반 경로 계획 알고리즘에 활용 가능
TSDF: Truncated SDF
TSDF는 일정 범위 이상의 거리값을 잘라낸(Truncate) SDF입니다.
TSDF의 특징
- 예시: Truncation 범위가 30cm인 경우
- 장애물 표면에서 30cm 이내: 정확한 거리값 저장
- 30cm 이상: "최대값(먼 곳)"으로 저장
TSDF의 장점
| 장점 | 설명 |
|---|---|
| 노이즈 제거 | 먼 거리의 부정확한 데이터 무시 |
| 부드러운 표면 | 여러 프레임을 누적하여 평균화 |
| 효율적 저장 | 표면 근처 데이터만 정밀하게 저장 |
TSDF 활용 사례
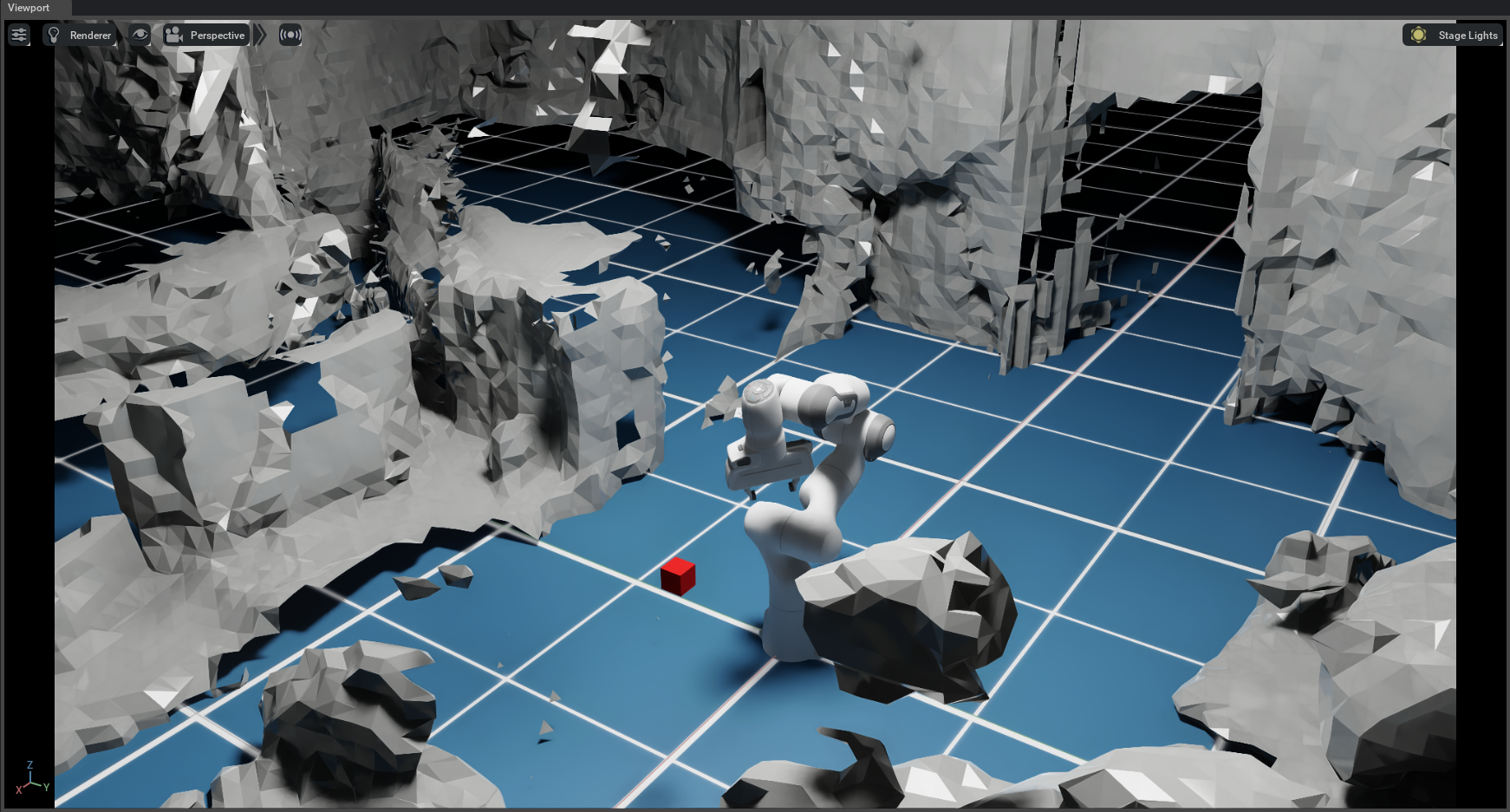
TSDF를 사용하여 Isaac Sim에 사무실 환경을 재건한 결과
주요 용도:
- 3D 표면 재구성 (Surface Reconstruction)
- 센서 노이즈 필터링
- 3D 환경 메시 생성
ESDF: Euclidean SDF
ESDF는 모든 Voxel에 대해 전체 유클리드 거리를 계산합니다. TSDF와 달리 먼 거리도 잘라내지 않습니다.
ESDF vs TSDF
| 측면 | TSDF | ESDF |
|---|---|---|
| 거리 범위 | Truncation 범위 내만 정확 | 전체 공간에서 정확 |
| 표면 근처 | 정밀 | 정밀 |
| 표면에서 먼 곳 | "최대값"으로 단순화 | 정확한 거리값 유지 |
| 기울기 정보 | 표면 근처에서만 유효 | 전체 공간에서 유효 |
ESDF의 핵심 장점
연속적인 기울기 정보: ESDF는 전체 공간에서 기울기가 유효하므로 최적화 기반 경로 계획에 적합합니다.
활용 사례:
- 충돌 회피 경로 계획
- 연속 기울기 기반 궤적 최적화
- 로봇 이동 중 안전 거리 계산
TSDF vs ESDF: 언제 무엇을 사용할까?
| 용도 | 권장 방식 | 이유 |
|---|---|---|
| 표면 재구성 | TSDF | 표면 근처만 필요, 노이즈 제거 효과 |
| 3D 스캔/매핑 | TSDF | 효율적 저장, 점진적 업데이트 |
| 경로 계획 | ESDF | 전체 공간의 기울기 필요 |
| 충돌 회피 | ESDF | 어디서든 안전 거리 확인 가능 |
| Sim-to-Real | TSDF → ESDF | 표면 재구성 후 경로 계획 |
핵심 정리
-
Voxel은 3D 공간의 픽셀로, 각 위치에 물리적 속성을 저장하는 데이터 컨테이너입니다. Point Cloud와 달리 빈 공간 정보도 표현할 수 있습니다.
-
Occupancy Grid는 점유 여부만 저장하므로 "얼마나 가까운가?"와 "기울기"를 알 수 없습니다.
-
SDF는 각 Voxel에 가장 가까운 장애물까지의 거리와 부호를 저장합니다. 양수는 외부, 음수는 내부를 의미합니다.
-
TSDF는 표면 근처만 정밀하게 저장하여 노이즈를 제거하고 표면 재구성에 적합합니다.
-
ESDF는 전체 공간의 거리를 저장하여 연속적인 기울기 정보를 제공하므로 경로 계획과 충돌 회피에 적합합니다.
로봇이 3D 환경을 안전하게 탐색하려면 단순한 점유 정보가 아닌, 거리 정보와 기울기가 필요합니다. SDF 계열 기술은 이 요구사항을 효율적으로 해결합니다.