How Robots Understand 3D Space: Voxels and SDF
In 2D images, the smallest unit is a Pixel. So what is the pixel of 3D space? It is a Voxel. A portmanteau of Volume and Pixel, voxels are 1x1x1 cubes that fill 3D space.
This article explains Voxels, SDF (Signed Distance Fields), and their variants TSDF and ESDF that robots use to understand their environment.
Voxel: A Data Container for 3D Space
A Voxel is a data container with unique 3D coordinates in a Cartesian coordinate system. Each Voxel can store physical properties of that location:
- Color (RGB)
- Density
- Occupancy status (Occupied/Free/Unknown)
- Distance to obstacles
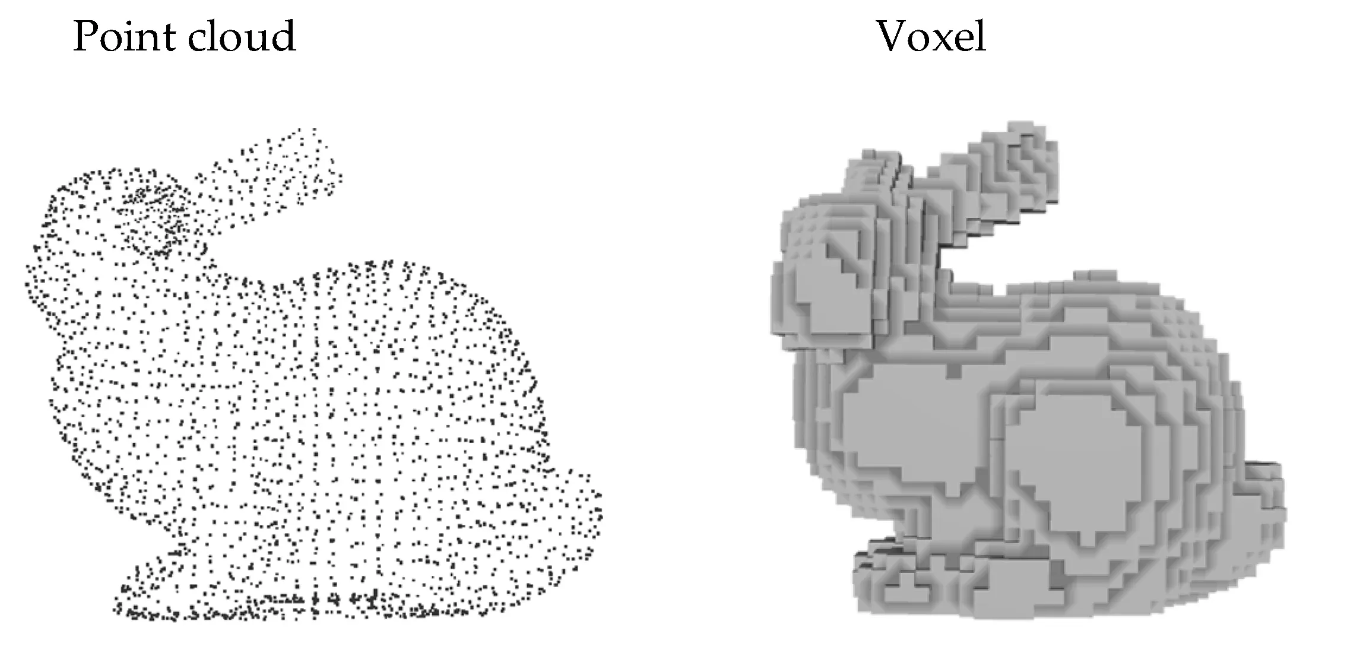
Point Cloud vs Voxel
Point Clouds obtained from LiDAR or depth cameras are fundamentally different from Voxels:
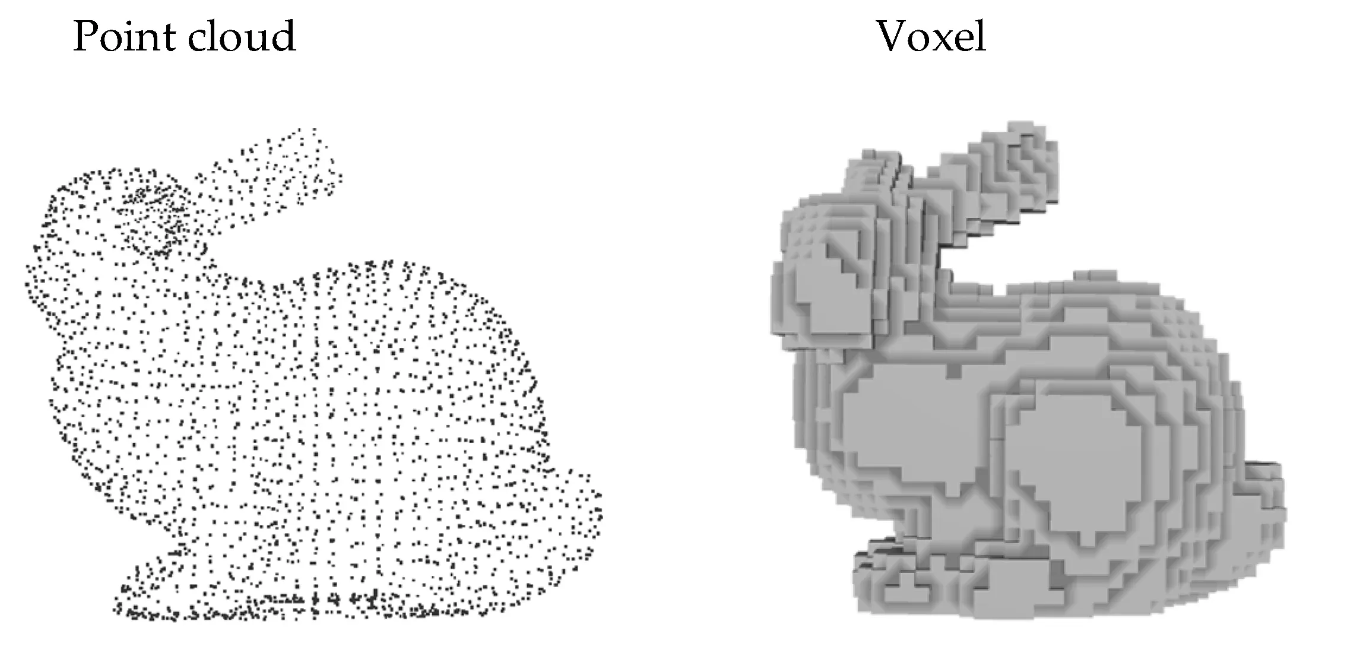
Comparison of Point Cloud (left) and Voxel (right) representations of the Stanford Bunny model
| Aspect | Point Cloud | Voxel |
|---|---|---|
| Representation | Surface (Shell) - collection of points reflected from sensors | Volume - includes surface, interior, and empty space |
| Coordinate System | Camera-relative (varies per sensor) | Fixed spatial grid, unique coordinates |
| Data Persistence | New points generated each frame, requires coordinate transformation and deduplication | Fixed unique coordinates, easy data merging |
| Empty Space Information | None | Available (Occupancy Grid) |
Key Difference: Point Clouds only tell "where objects are", while Voxels also tell "where space is empty".
Occupancy Grid Map
Storing occupancy information in Voxels creates a 3D map:
| State | Meaning |
|---|---|
| Occupied | Obstacle present |
| Free | Empty space |
| Unknown | Not yet explored |
Values can be stored as binary 0/1 or probability values.
Limitations of Occupancy Grids
Simple occupancy information alone cannot solve two problems:
Problem 1: Safety Distance Verification
Robots are rigid bodies with volume. They need to know how close they are to obstacles for safe movement.
- Occupancy Grid: Can only check if current position is Occupied
- Limitation: Cannot answer "how close?" - must search surrounding Voxels each time
Problem 2: Gradient Information for Path Optimization
Modern path planning algorithms require gradient information for smooth trajectory generation.
- Occupancy Grid: Discrete 0/1 values - not differentiable
- Limitation: Cannot be used for optimization-based path planning
SDF: Signed Distance Fields
SDF pre-computes and stores the distance to the nearest obstacle surface for each Voxel.
Components of SDF
- Value (distance): Euclidean distance to the nearest obstacle
- Sign:
- Positive (+): Outside the obstacle
- Negative (-): Inside the obstacle
Problems SDF Solves
Safety Distance Verification:
Current position SDF value = 3.5cm
-> Nearest obstacle is 3.5cm away
-> Safe if robot radius is 3cm
Safety distance can be verified with a single lookup without searching surrounding Voxels.
Gradient-Based Optimization:
Since SDF contains continuous distance values, gradients (derivatives) can be calculated. This enables:
- Knowing the direction away from obstacles
- Use in optimization-based path planning algorithms
TSDF: Truncated SDF
TSDF is an SDF that truncates distance values beyond a certain range.
TSDF Characteristics
- Example: With a truncation range of 30cm
- Within 30cm of obstacle surface: Store accurate distance values
- Beyond 30cm: Store as "maximum value (far)"
TSDF Advantages
| Advantage | Description |
|---|---|
| Noise Removal | Ignores inaccurate data from far distances |
| Smooth Surfaces | Averages across multiple accumulated frames |
| Efficient Storage | Only stores precise data near surfaces |
TSDF Use Cases
Result of reconstructing an office environment in Isaac Sim using TSDF
Primary Applications:
- 3D Surface Reconstruction
- Sensor noise filtering
- 3D environment mesh generation
ESDF: Euclidean SDF
ESDF calculates the full Euclidean distance for all Voxels. Unlike TSDF, it does not truncate far distances.
ESDF vs TSDF
| Aspect | TSDF | ESDF |
|---|---|---|
| Distance Range | Accurate only within truncation range | Accurate across entire space |
| Near Surface | Precise | Precise |
| Far from Surface | Simplified to "maximum value" | Maintains accurate distance values |
| Gradient Information | Valid only near surface | Valid across entire space |
Key Advantages of ESDF
Continuous Gradient Information: Since ESDF provides valid gradients across the entire space, it is suitable for optimization-based path planning.
Use Cases:
- Collision avoidance path planning
- Continuous gradient-based trajectory optimization
- Safety distance calculation during robot movement
TSDF vs ESDF: When to Use What?
| Purpose | Recommended Method | Reason |
|---|---|---|
| Surface Reconstruction | TSDF | Only needs near-surface data, noise removal effect |
| 3D Scanning/Mapping | TSDF | Efficient storage, incremental updates |
| Path Planning | ESDF | Needs gradients across entire space |
| Collision Avoidance | ESDF | Can verify safety distance anywhere |
| Sim-to-Real | TSDF -> ESDF | Surface reconstruction then path planning |
Key Takeaways
-
Voxels are pixels of 3D space, data containers that store physical properties at each location. Unlike Point Clouds, they can also represent empty space information.
-
Occupancy Grids only store occupancy status, so they cannot answer "how close?" or provide "gradients".
-
SDF stores the distance and sign to the nearest obstacle for each Voxel. Positive means outside, negative means inside.
-
TSDF stores precise data only near surfaces, which removes noise and is suitable for surface reconstruction.
-
ESDF stores distances across the entire space, providing continuous gradient information, making it suitable for path planning and collision avoidance.
For robots to safely navigate 3D environments, they need not just simple occupancy information, but distance information and gradients. SDF-family technologies efficiently solve these requirements.