Control
RL-Based Low-Level Motor Control: Beyond PID/ADRC
In the domain of 1kHz real-time motor control that LLMs cannot replace, we introduce WIM's approach to replacing traditional PID/ADRC manual tuning with reinforcement learning (RL).
14 technical articles
In the domain of 1kHz real-time motor control that LLMs cannot replace, we introduce WIM's approach to replacing traditional PID/ADRC manual tuning with reinforcement learning (RL).
We measured whether atomic memory ordering could be a performance bottleneck in a 1kHz RT loop on Jetson Orin (Cortex-A78AE). On AArch64, the cost of seq_cst is virtually identical to release/acquire, and the total cost of 25 atomic operations is less than 0.01% of the 1ms budget.

An exploration of how template matching technology in computer vision has evolved from pixel-based methods through SIFT/ORB to SuperPoint/SuperGlue. Covers the principles, limitations, and use-case recommendations for each approach.
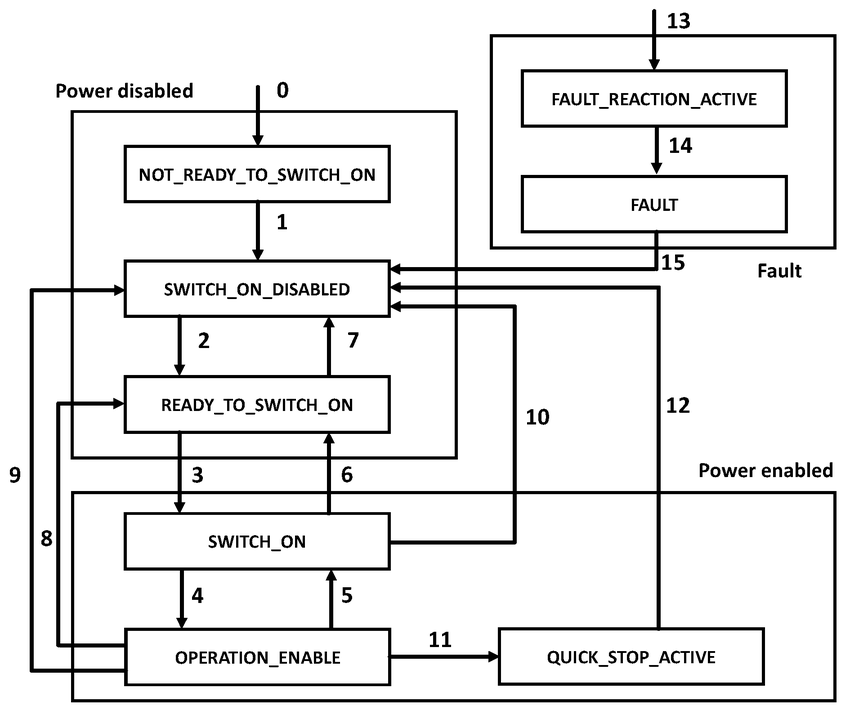
This article explains the CiA402 profile, the motor control standard for industrial robots based on EtherCAT and CANopen. It covers the state machine, Controlword/Statusword bit structures, and operation modes with practical examples.
The factor determining IPC performance in robot control systems is the synchronization mechanism, not process boundaries. We share a case study achieving 100x improvement from 78-103us with Mutex to 0.74-0.82us with Lock-free.
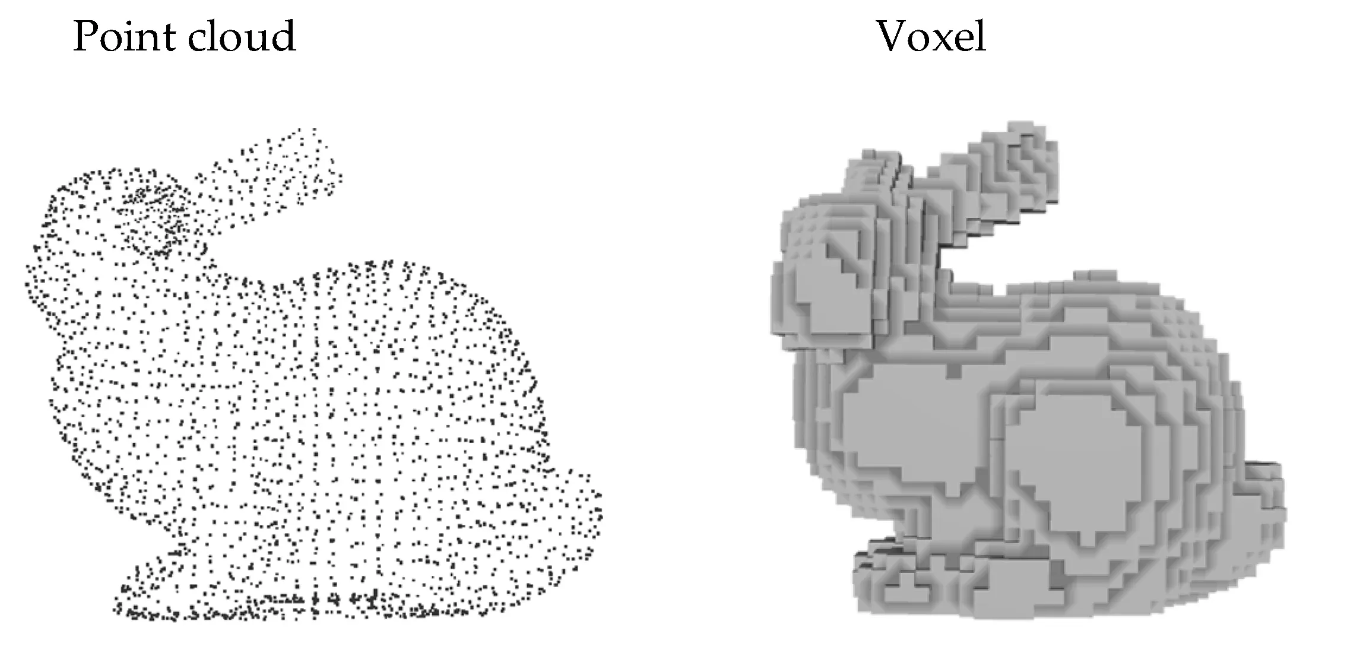
Explains Voxel, SDF, TSDF, and ESDF technologies that robots use to represent and understand 3D environments. Covers differences from Point Clouds and practical applications in robot path planning and surface reconstruction.
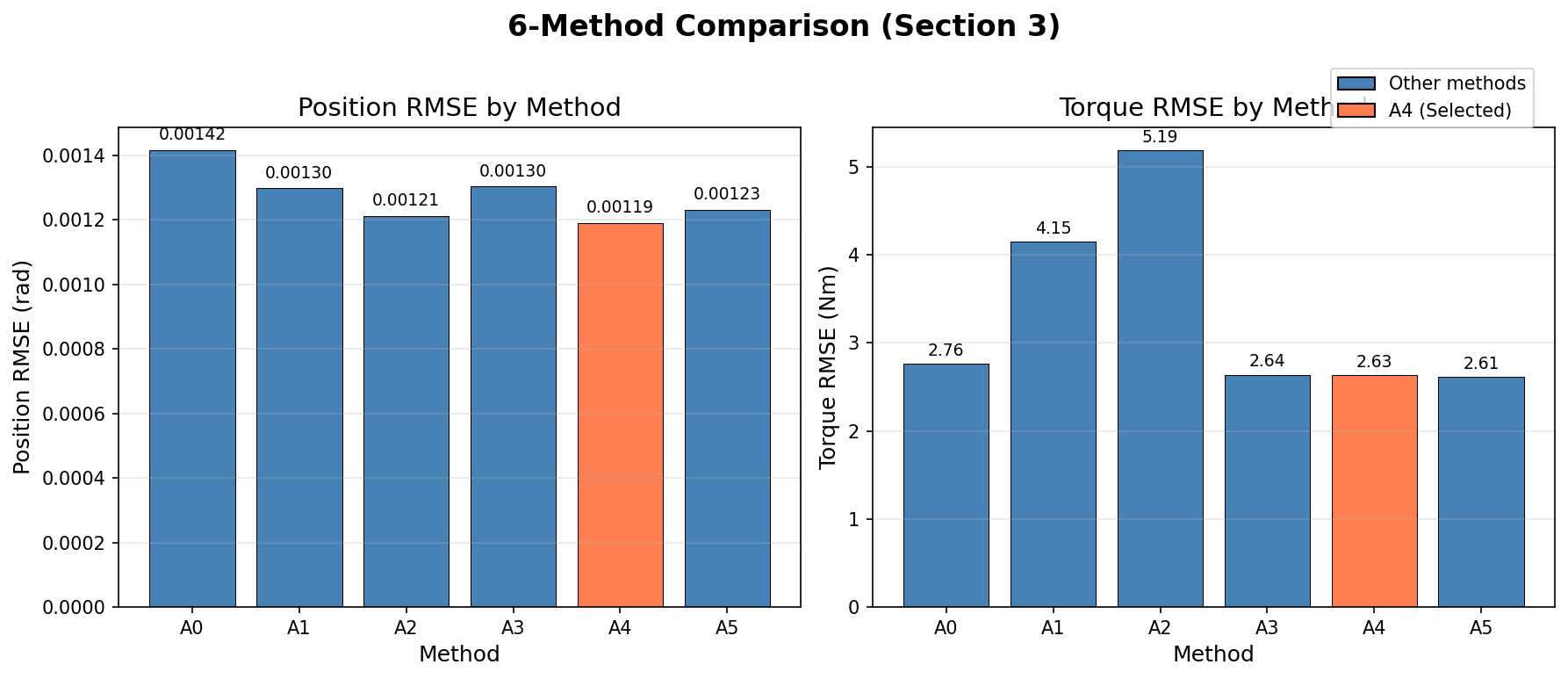
We share the process of optimizing acceleration feedforward control for a 6-axis robot arm. By using planner acceleration + LPF instead of numerical differentiation, we achieved 21.2% improvement in position RMSE and torque stability simultaneously.
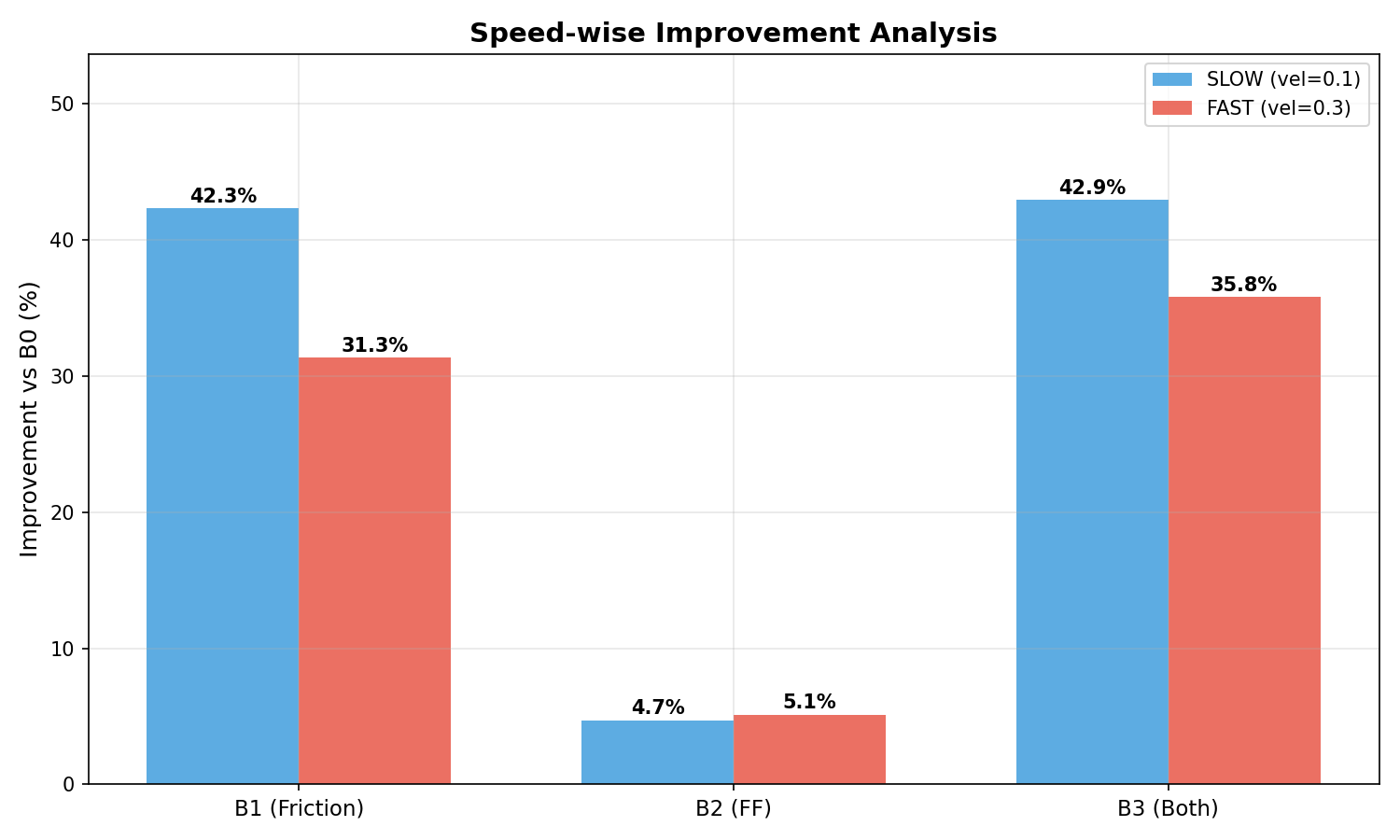
We validate the effects of friction compensation and acceleration feedforward on a 6-axis collaborative robot through 160 runs of 2x2 experiments. Friction coefficients were tuned using an AI agent (ralph-loop), and validation experiments were conducted with automated scripts. Friction compensation alone achieved 36% improvement (Cohen's d=1.49), accounting for 93% of total improvement.
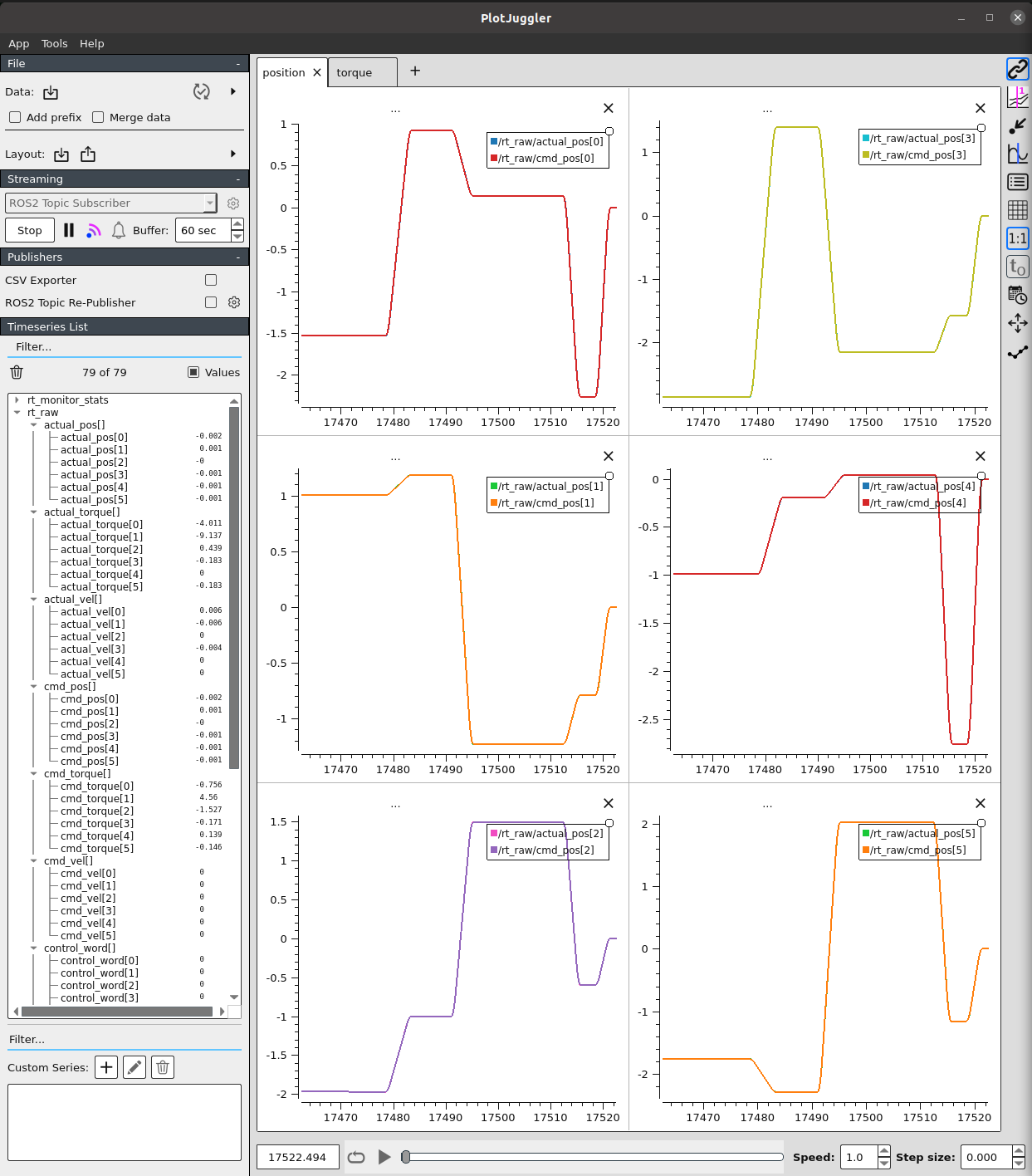
Design a monitoring architecture that safely collects, stores, and visualizes performance data from EtherCAT-based 1kHz real-time control loops. Maintain RT determinism while capturing debugging data using Lock-free SPSC Queues and ROS2 topic layering.
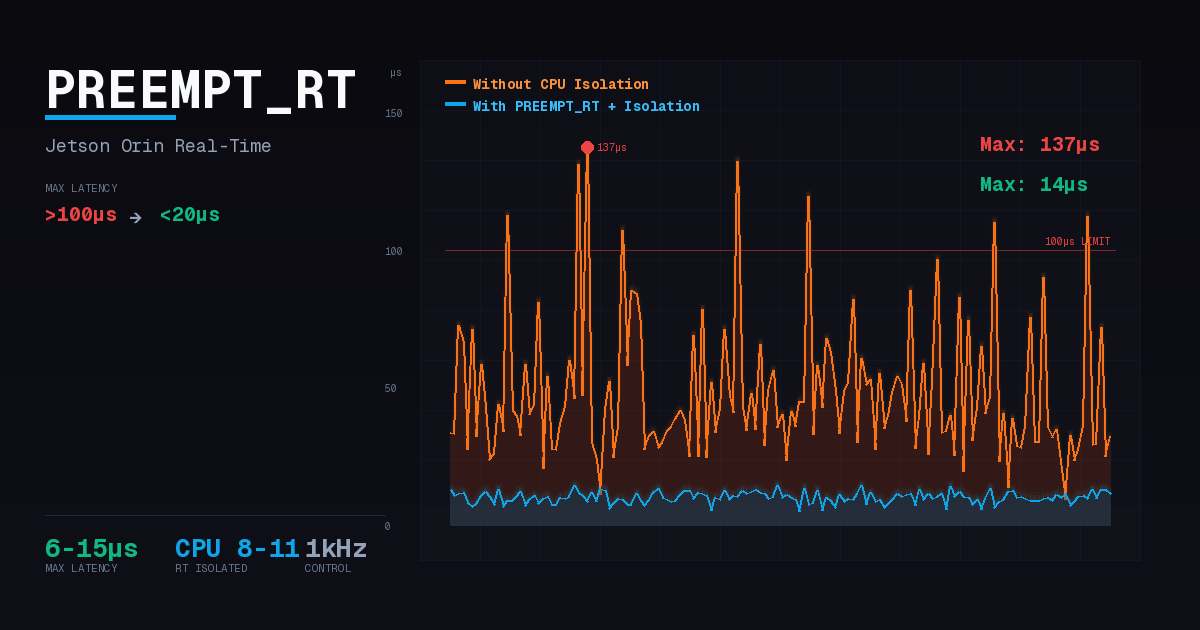
We validate with measured data whether PREEMPT_RT kernel and CPU isolation alone can enable 1kHz EtherCAT control on NVIDIA Jetson Orin. Under GPU, Storage, and EtherCAT load conditions, we achieved max latency below 20us.
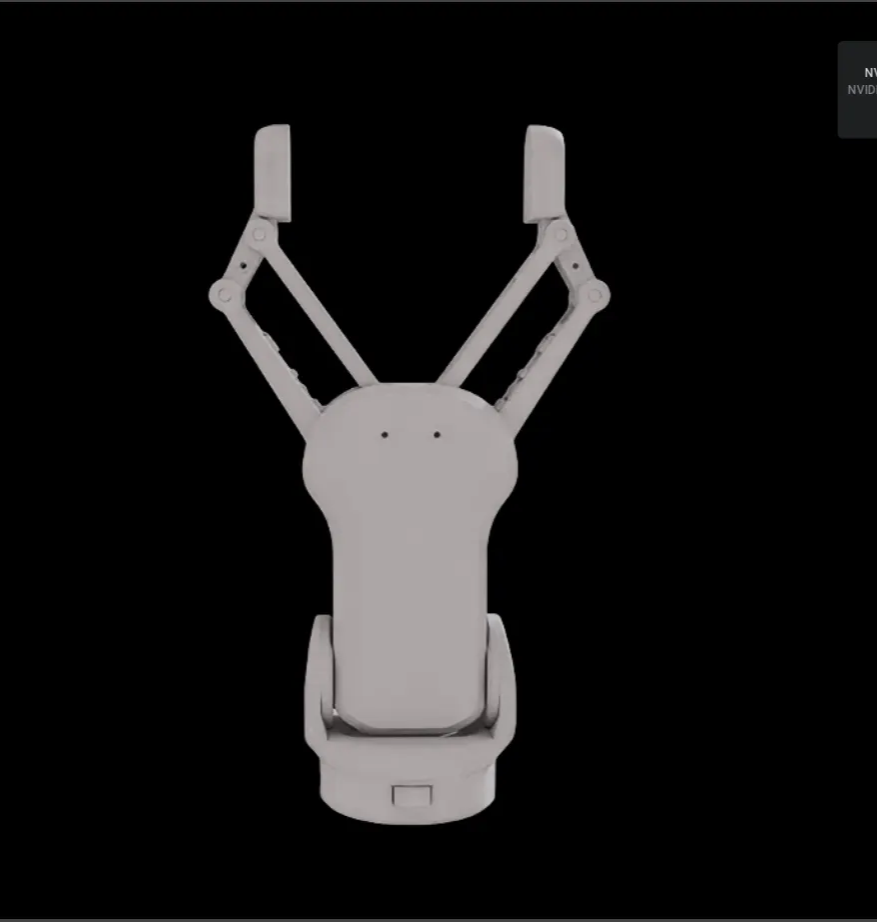
Learn how to resolve issues with closed-loop structures like delta robots and parallel-link grippers that fail to work in Isaac Sim, using Guide Joint and Exclude From Articulation settings.
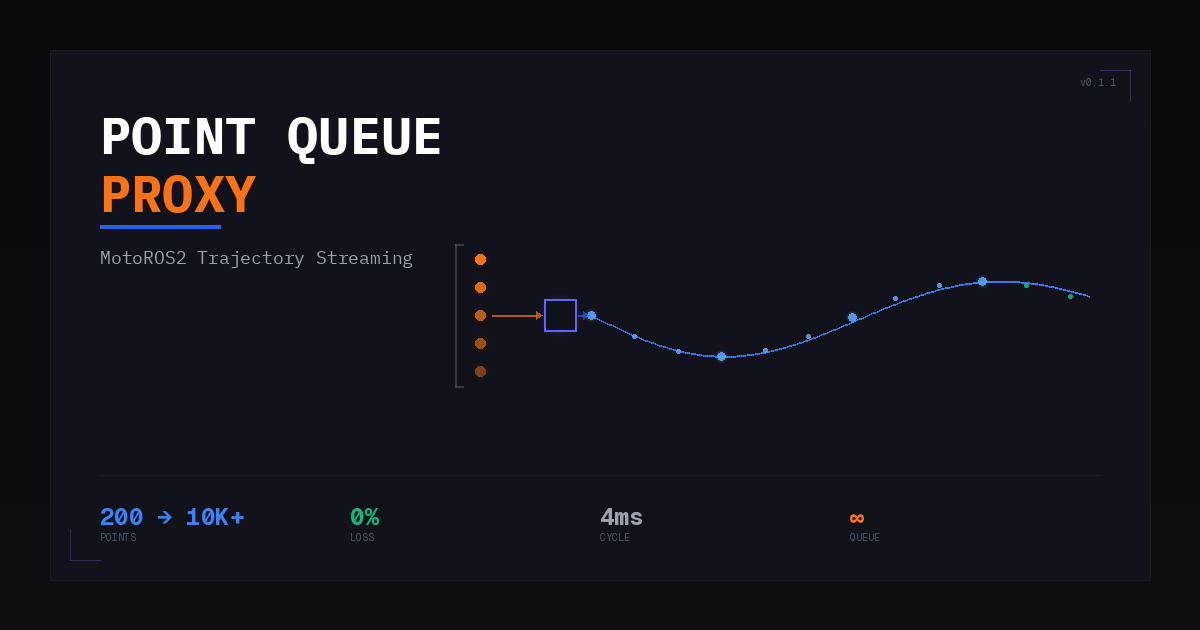
Learn how to overcome MotoROS2's 200-point trajectory limitation and BUSY response issues on Yaskawa industrial robots through a Proxy Server architecture design and implementation.
A practical guide to achieving sub-0.5mm Sim-to-Real calibration by combining Touch Probe and Kabsch Algorithm to overcome the limitations of vision-based approaches.

A practical case study on optimizing a PyTorch-based YOLO model using TensorRT and DeepStream for a recycled plastic sorting system, reducing inference time from 15ms to 7ms.